
 医療・創薬・医療機器
医療・創薬・医療機器
 ライフサイエンス
ライフサイエンス
 情報通信
情報通信
 環境
環境
 ナノテクノロジー・材料
ナノテクノロジー・材料
 ものづくり・機械
ものづくり・機械
 社会基盤・安全
社会基盤・安全
 フロンティア・宇宙
フロンティア・宇宙
 人文・社会
人文・社会

 さまざまな凹凸形状をつかめるピン配列型把持機構
さまざまな凹凸形状をつかめるピン配列型把持機構
更新:2024/01/18

- 概要
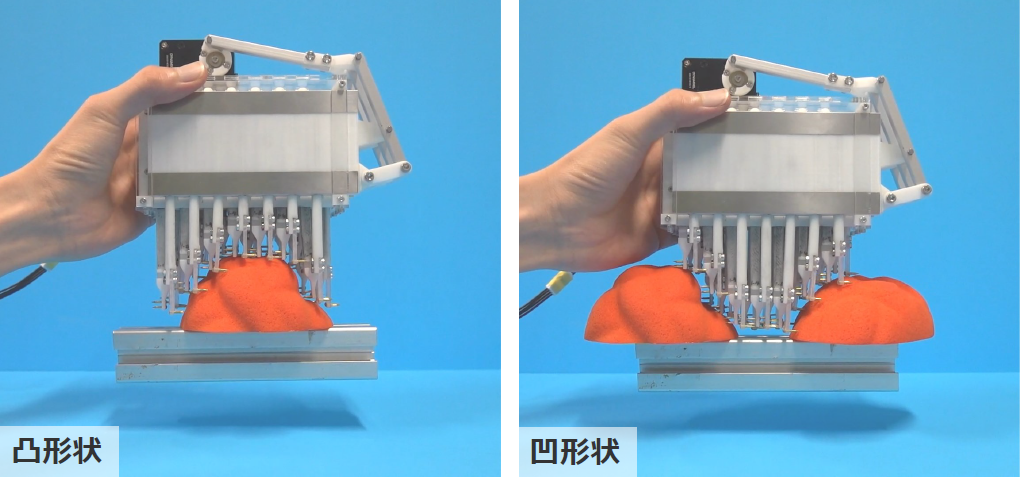
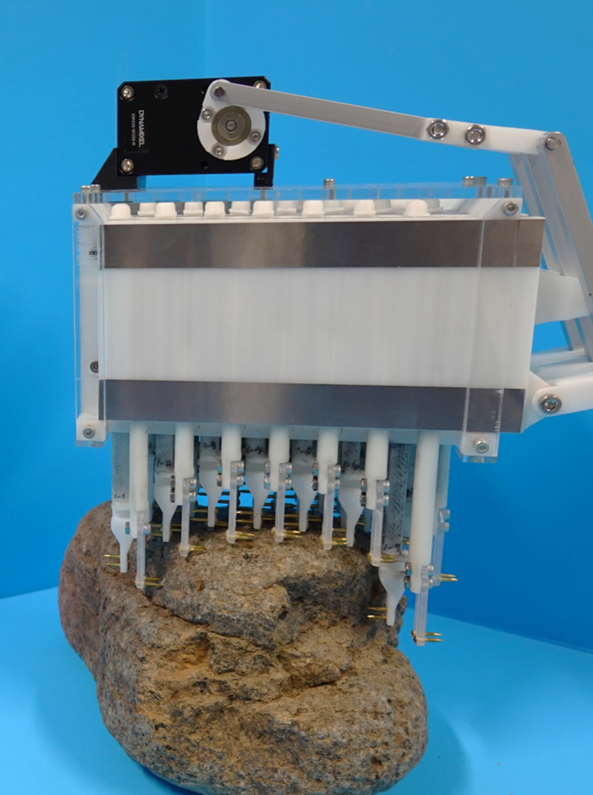
対象物の形状が未知の複雑な凹凸形状であっても把持可能で、形状の推定も可能な、簡単な機構のグリッパを開発した。グリッパは、行列に配列した複数のピンと、ピン先端に爪を持つ。このグリッパは、駆動により複数箇所で強固に対象物を把持することができる。
- 従来技術との比較
本技術では未知の形状も含むどのような形状の対象物に対しても接触可能であり、接触後、複数のピン先を動作させて対象物を強固に把持できる。さらに、形状計測も同時に可能である。
- 特徴・独自性
-
- 対象物が凸形状でも凹形状でも同じ動作原理でピン配列を動作させて接触把持するため、必要なアクチュエータ数は1つだけである
- ピン配列を水平方向に動作させた際にピンの動きがロックされ、より安定した把持を実現する
- 対象物に接触させた時のピンの移動量を計測することで、対象物の3次元形状計測も可能である
- ピン先にゴム製素材を用いる等することで、柔らかい不定形状も把持可能と考えられる
- 実用化イメージ
-
搬送システム、産業用機械、不整地移動ロボティクス、土木建設機械、農業用機械などで有効なグリッパ機構を探している企業に有効です。量産・高品質化を目指した改良、実現場への応用を協働する相手を求めています。
- キーワード
研究者
大学院工学研究科
航空宇宙工学専攻
宇宙システム講座(宇宙探査工学分野)
宇野 健太朗 助教
博士(工学)(東北大学)/修士(工学)(東北大学)
Kentaro Uno, Assistant Professor
ロボティクスを専門とし,特に月惑星表面や周回軌道などの極限環境で機能するロボットや自動化技術に関する研究を推進しています.
