
 医療・創薬・医療機器
医療・創薬・医療機器
 ライフサイエンス
ライフサイエンス
 情報通信
情報通信
 環境
環境
 ナノテクノロジー・材料
ナノテクノロジー・材料
 ものづくり・機械
ものづくり・機械
 社会基盤・安全
社会基盤・安全
 フロンティア・宇宙
フロンティア・宇宙
 人文・社会
人文・社会

 生物のようにレジリエント(しなやかでタフ)な人工物の開発
生物のようにレジリエント(しなやかでタフ)な人工物の開発
更新:2020/06/16
- 特徴・独自性
-
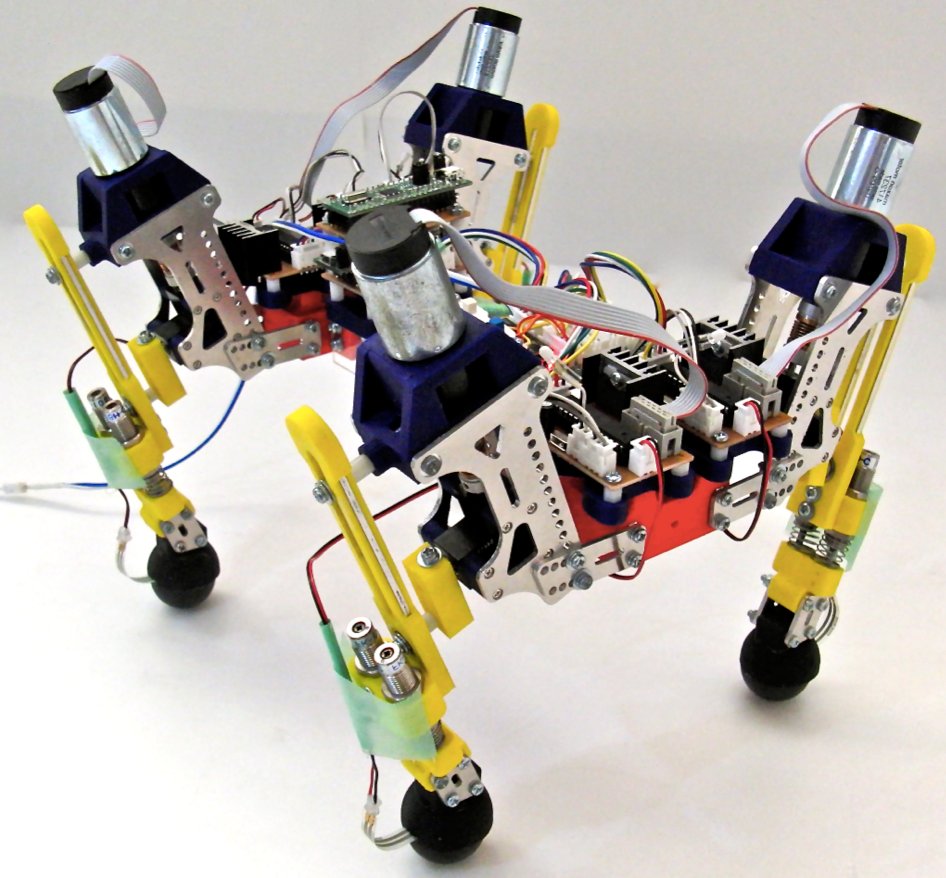
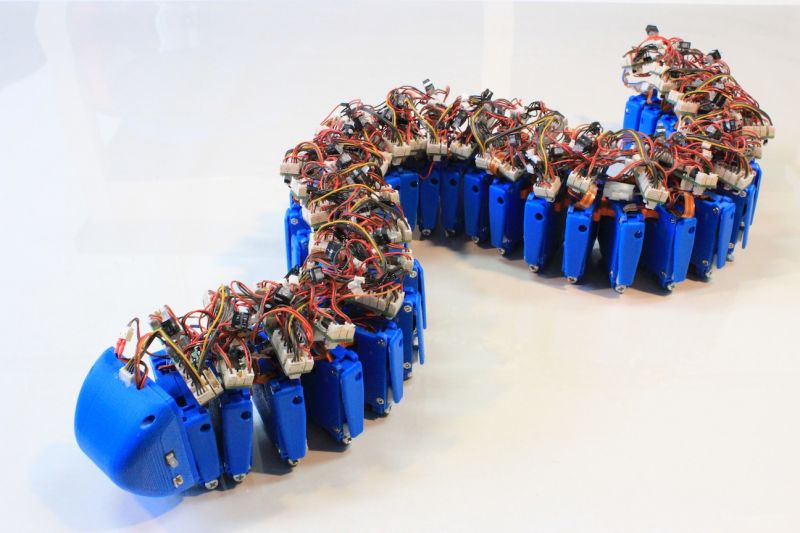
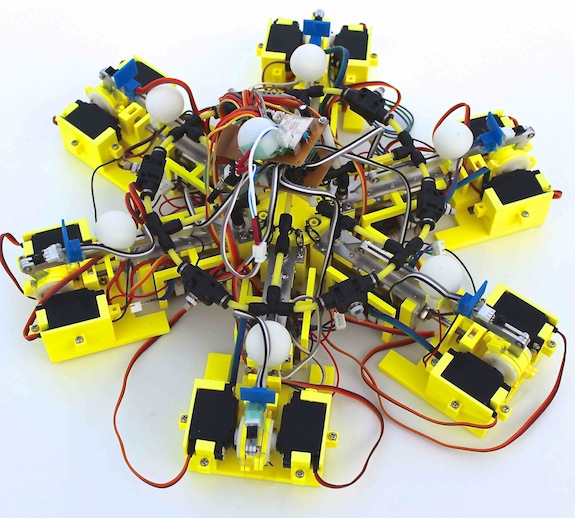
- 生物は、比較的単純な機能を有する要素が多数集まって相互作用することで、予測不能的に変動する実世界環境下であってもしぶとくかつタフに振る舞うことができる。当研究室では、自律分散制御という概念を基盤として、このように優れたリジリアンスを持つ生物の設計原理の解明を通して、従来の人工物に比べて著しい環境適応性や耐故障性を有する人工物の設計・開発に関する研究を進めている。
- 実用化イメージ
-
大自由度システムの制御や、実世界環境下で適応的に行動するロボットの開発など。
- キーワード
研究者
電気通信研究所
人間・生体情報システム研究部門
実世界コンピューティング研究室
石黒 章夫 教授
工学博士 名古屋大学
Akio Ishiguro, Professor
