
 ENGLISH
ENGLISH


研究者紹介
田村 雄介 准教授
2023.11.30
大学院工学研究科 ロボティクス専攻 先進ロボティクス講座(先進ロボティクス分野)
准教授 田村 雄介(たむら ゆうすけ) 先生
_______________
●INTRODUCTION●
飲食店やビルなどでサービスロボットを目にする機会も増えてきました。すかいらーくでネコ型ロボッ
准教授 田村 雄介(たむら ゆうすけ) 先生
_______________
●INTRODUCTION●
飲食店やビルなどでサービスロボットを目にする機会も増えてきました。すかいらーくでネコ型ロボッ
トがピザを配膳してくれた時には思わず写真を撮ってしまいました。様々なロボットと暮らす共生社会
が実現し始めてきていますが、こうしたロボットをよりスマートに安全に動かすための研究開発もます
ます重要となってきています。今回は、人とロボットの共生のための研究を専門とする田村先生にお話
を伺いました。
_______________
_______________
ロボットの研究と聞くと、新しい形のロボットを作り出す研究を想像される方も多いかと思いますが
私たちの研究室はロボットのハード面の開発というよりも、人間と共生するためにロボットをどうやっ
て社会の中でインテリジェントに動かすか?ということに焦点を当てています。

写真1:研究内容を説明する田村先生。
これからの社会では、様々なサービスを提供するロボットがより我々の身近に存在するようになりま
す。特に自動運転車、配送用ロボット等については、近い未来にすぐそばで活躍するようになるでしょ
う。そうしたロボットは、人の社会の中に安全に溶け込んでいく必要があります。ロボット側には共存
相手である人間がどのように行動するのかを検知・予測し、人間社会の中で適切に振る舞うことが求め
られます。
私は、ロボットがそのような安全でスマートな振る舞いが出来るよう、人間の動きを予測させ、ロボ
私は、ロボットがそのような安全でスマートな振る舞いが出来るよう、人間の動きを予測させ、ロボ
ット自身の行動に反映する研究に取り組んでいます。
具体的にどのような研究を行っているのかについて、研究テーマを1つご紹介します。ロボットによ
る他者の行動予測に関する研究です。ロボットと人が運転する車、歩行者が存在する場でロボットを適
切に動かすことを目的としたテーマです。
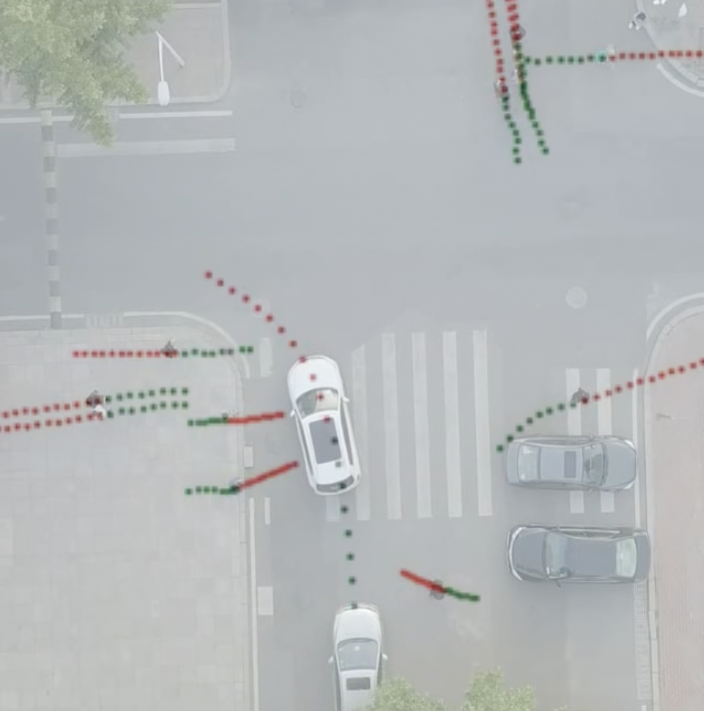
図1:歩行者と車の移動予測。緑の点が移動履歴、赤い点が予測を示す。
道を歩いていて向こう側から人が来たとします。人間同士であれば、お互いに譲り合いますが、相手
がこちらに気づいていない場合、こちらが避けなければぶつかってしまいます。ロボットについても相
手(人間)がこちらに気づいているか等の情報を判断し、ロボット自身の次の行動にその情報を反映す
る必要があります。このような人間の移動予測を行うことで、人間とロボットの衝突可能性を予測する
ことにつながり、人間とロボットが共存する環境での移動がより身近なものになりつつありますが、人
間がどのように行動するかを予測すること自体は、まだ難しいテーマです。
1995年に、環境の影響(壁や置かれた物体から斥力を受けるような影響)を受けて歩行者の動きが変
化するモデル「ソーシャルフォースモデル」が提唱され、ある程度人の動きが物理モデルで記述される
ようになりました。さらに2016年頃には、歩行者間の関係を深層学習ベースの予測に取り入れたSocial
LSTMモデルというものが提唱されました。学習のためには多くのデータが必要ですが、日本にはあまり
オープンなデータセットがありません。海外で公開されている歩行者の動き、車の動きのデータセット
で学習させたモデルを使い、人や移動体がどんな動きを取りそうなのか、かなり精度よく予測すること
が出来ています。学習するデータを追加することで、特定の環境・条件での動きの精度を上げることも
可能です。より精度を上げるために、交差点では歩行者が車に道を譲るかどうかの判定を入れるなど、
いろいろなアプローチを進めています。
また、こうしたモデルでは、歩行者は理想的な存在として、周辺全ての情報を知覚できるというモデ
ルになっています。現実の人間はそうではありません。例えば、歩きスマホをしている歩行者は、周囲
に注意が向いておらず、ロボットや車に気づかず危険である可能性が高いと考えられます。特徴的な動
きの歩行者として、こういった歩行者を検出し考慮することを考えました。
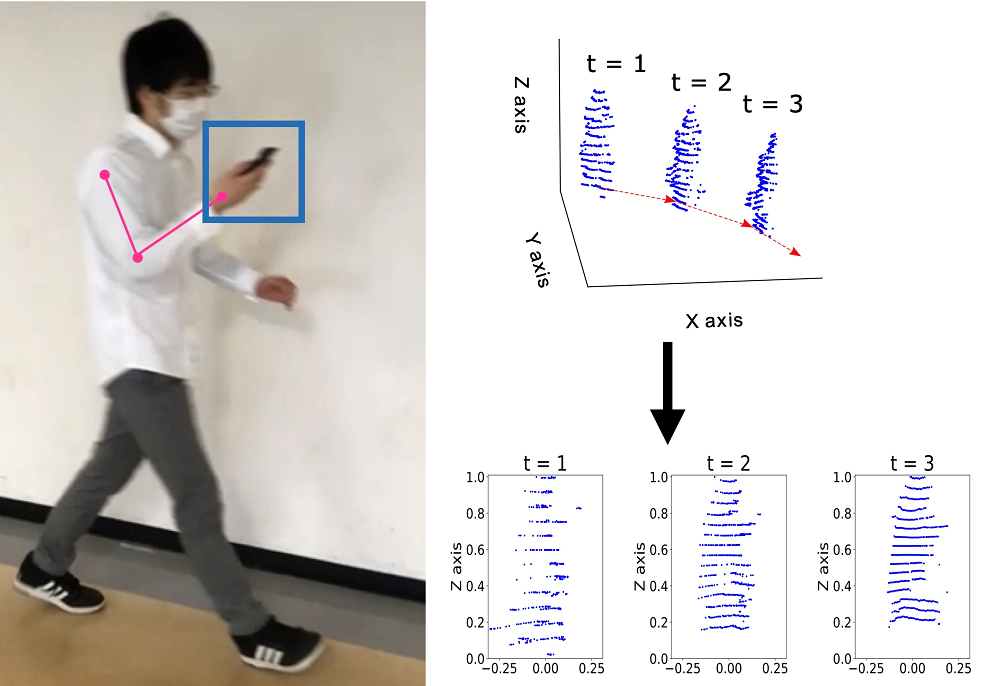
図2:歩きスマホの検出。画像判定(左)では肘の角度とスマホを検出する。3次元LiDAR点群データ
(右)では、レーザー光の反射を点群データとして取得・変換して判定するため、プライバシーに配慮
しながらも歩きスマホを検出可能。
歩きスマホの検出手法として、1つ目にカメラで撮影した画像から判定する方法があります。画像か
ら人の腕を判定し、その先にスマホを持っているかどうか、肘を曲げているかどうか、スマホに顔を向
けているかどうかを条件に抽出すると、高い確率で歩きスマホを検出することが出来ます。ただ、プラ
イバシーの観点から撮影は難しい場合もあります。こうした場合は別の手段として3次元LiDAR(レー
ザー光の反射光を用いたセンシング)により人物のレーザー反射光の点群データを取得し、解析・判定
するという方法もあります。こちらでも、歩きスマホ特有の姿勢をかなりの精度で検出することが出来
ます。また、夜間等でも検知できるメリットもあります。ただ、持っているものがスマホではなくドリ
ンクである等については判定しにくく、こうした細かいところについてはやはり画像が必要になります。
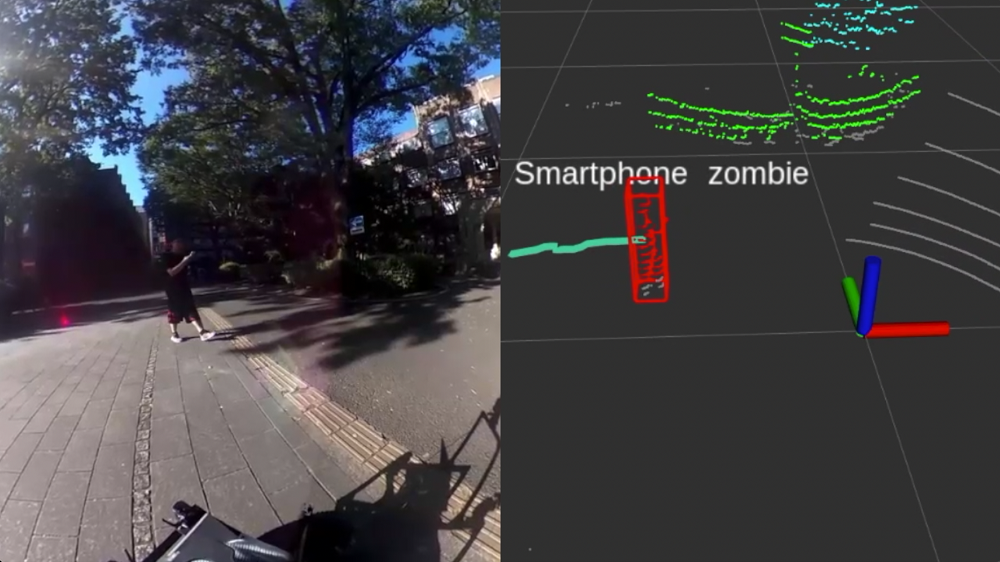
図3:図3:移動ロボットからの3次元LiDAR測定により歩きスマホ(Smartphone zombieと表現)
の検出に成功しています。(左側のカメラ画像から歩行者の歩きスマホが行われていることが確認でき
ます。)
このように、危険な動きを取る特徴的な歩行者を検出することに成功しています。しかし、人間の行
動の予測精度を上げるアプローチは大切ですが、個々の人間の移動軌跡を完全に予測することは現実的
には難しいことです。ロボットをより安全に動かすために、軌跡ではなく、予測円という考え方を取り
入れました。予測円の重ね合わせにより、この範囲にこの人が来る確率が高い、という位置予測の濃淡
をつけた分布マップを提案しました。この考え方を取り入れることで、ロボットは人間の位置や動きの
情報から、最も自分が動くべきエリアを判断することが出来るのです。
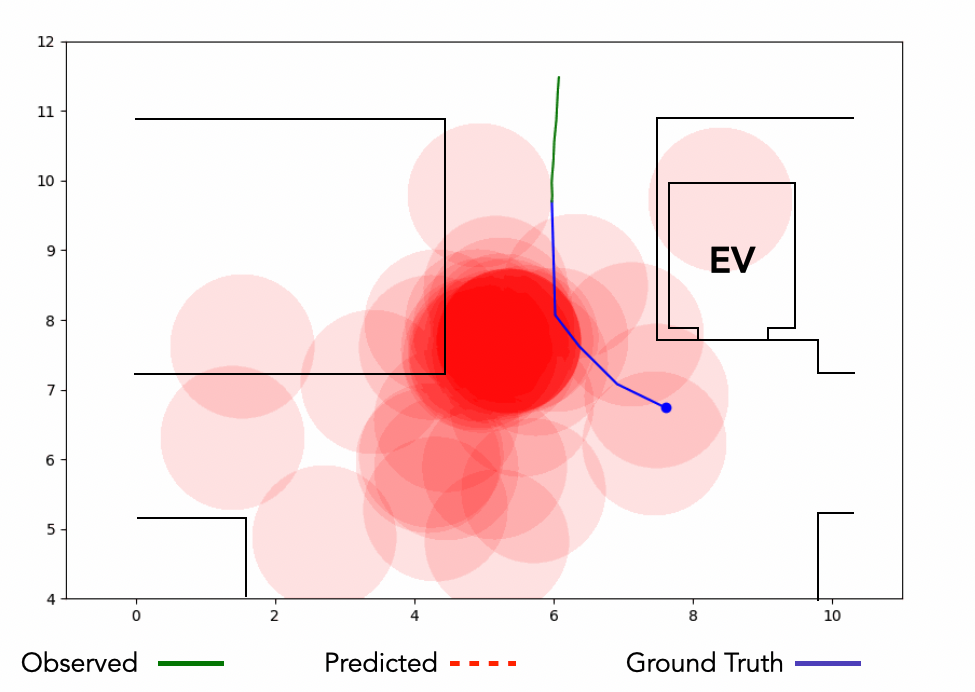
図4:予測円の重ね合わせによる人の移動予測。緑が実績、赤い円が予測、青が人が実際に動いた軌跡
を示す。濃い赤で示されるエリアに人が移動する可能性が高い。
実際に360度カメラをロボットに載せて、人間や車の行動予測を立て、将来の位置を分布として予
測し、(ロボットの移動に反映する)実験も行っています。こうした技術が近い将来、人間や、人間が
運転する車と自動運転車や様々なロボットが安全に共存するために役に立つはずです。
私の研究室では他にも、人間の視線や注意を推定・コントロールする研究、スポーツやリハビリテー
ションのための姿勢を推定する研究、或いは原子力発電所の放射線源を探索するといったプロジェクト
にも参画しています。
このように「人」を主軸に人とロボットが共存する社会を実現するための取り組みをベースに研究を
進めています。このようなアプローチに関心のある企業の方は、是非連携をご相談頂ければ幸いです。
★産学連携ポイント★
・人の姿勢や動きの検出・予測
・ロボットと人との共生
・ロボットの移動
・ロボットと人との共生
・ロボットの移動
↓↓もっと知りたい方はこちら↓↓
・東北大学研究者紹介
・東北大学研究者紹介
以上