医療・創薬・医療機器
医療・創薬・医療機器
 ライフサイエンス
ライフサイエンス
 情報通信
情報通信
 環境
環境
 ナノテクノロジー・材料
ナノテクノロジー・材料
 エネルギー
エネルギー
 ものづくり・機械
ものづくり・機械
 社会基盤・安全
社会基盤・安全
 フロンティア・宇宙
フロンティア・宇宙
 人文・社会
人文・社会

ら行のキーワード 106ワード
ろ
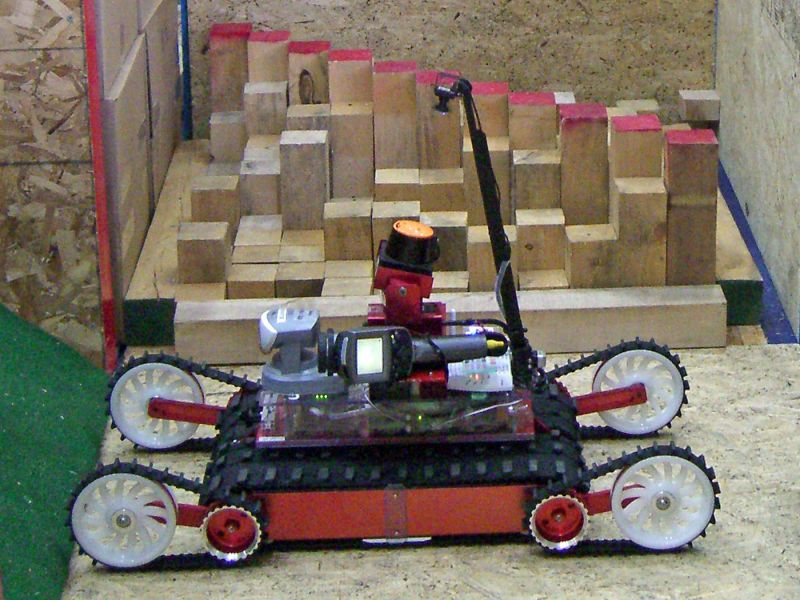
〈ロボティクス〉
安全で安心して暮らせる豊かな社会を実現するためのロボットテクノロジー
研究者大学院情報科学研究科 応用情報科学専攻 応用情報技術論講座(人間-ロボット情報学分野) 田所 諭
Satoshi Tadokoro |
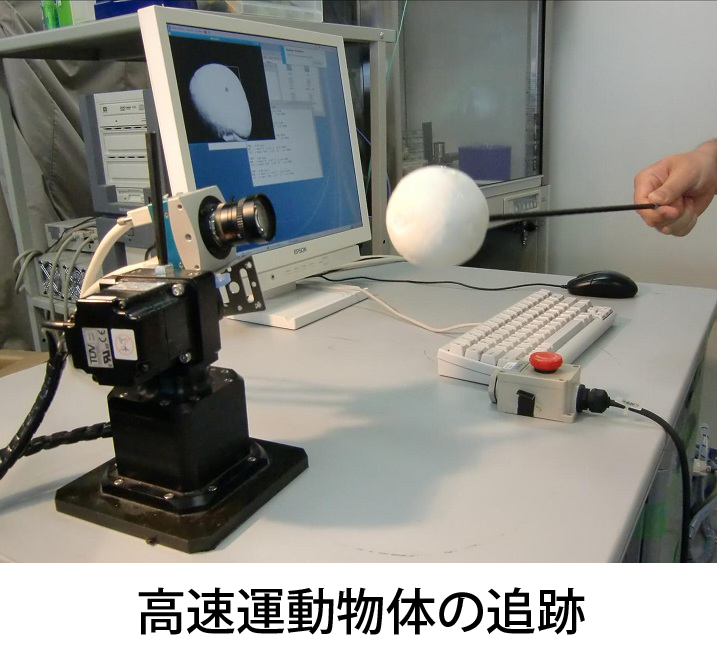
キャリブレーションを必要としない高度ビジョンシステム
研究者大学院情報科学研究科 システム情報科学専攻 知能ロボティクス学講座(知能制御システム学分野) 橋本 浩一
Koichi Hashimoto |
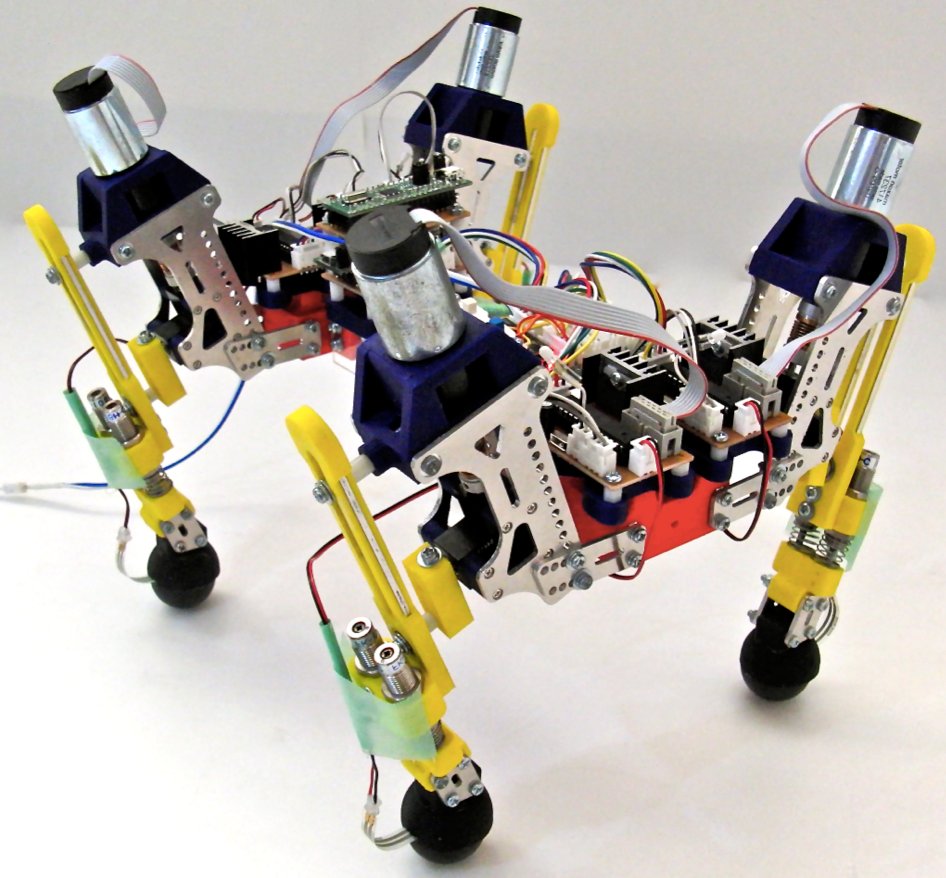
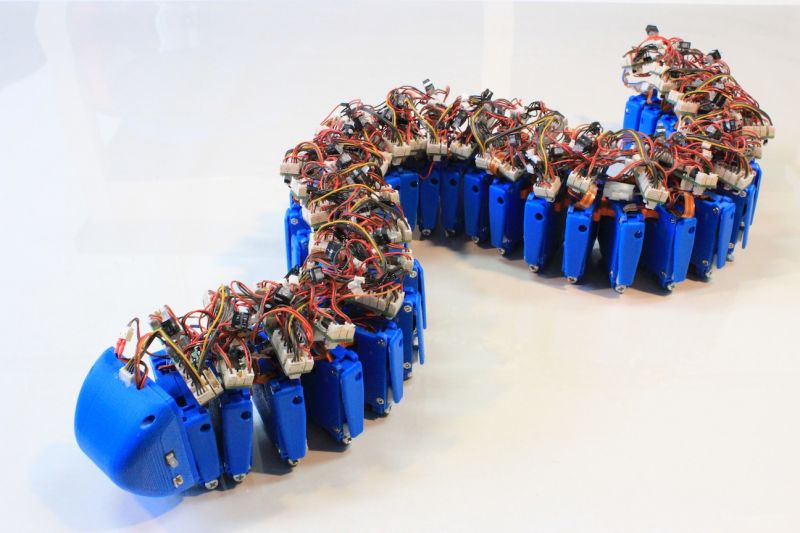
生物のようにレジリエント(しなやかでタフ)な人工物の開発
研究者電気通信研究所 人間・生体情報システム研究部門 実世界コンピューティング研究室 石黒 章夫
Akio Ishiguro |
宇宙探査ロボットの研究・開発
研究者大学院工学研究科 航空宇宙工学専攻 宇宙システム講座(宇宙探査工学分野) 吉田 和哉
Kazuya Yoshida |
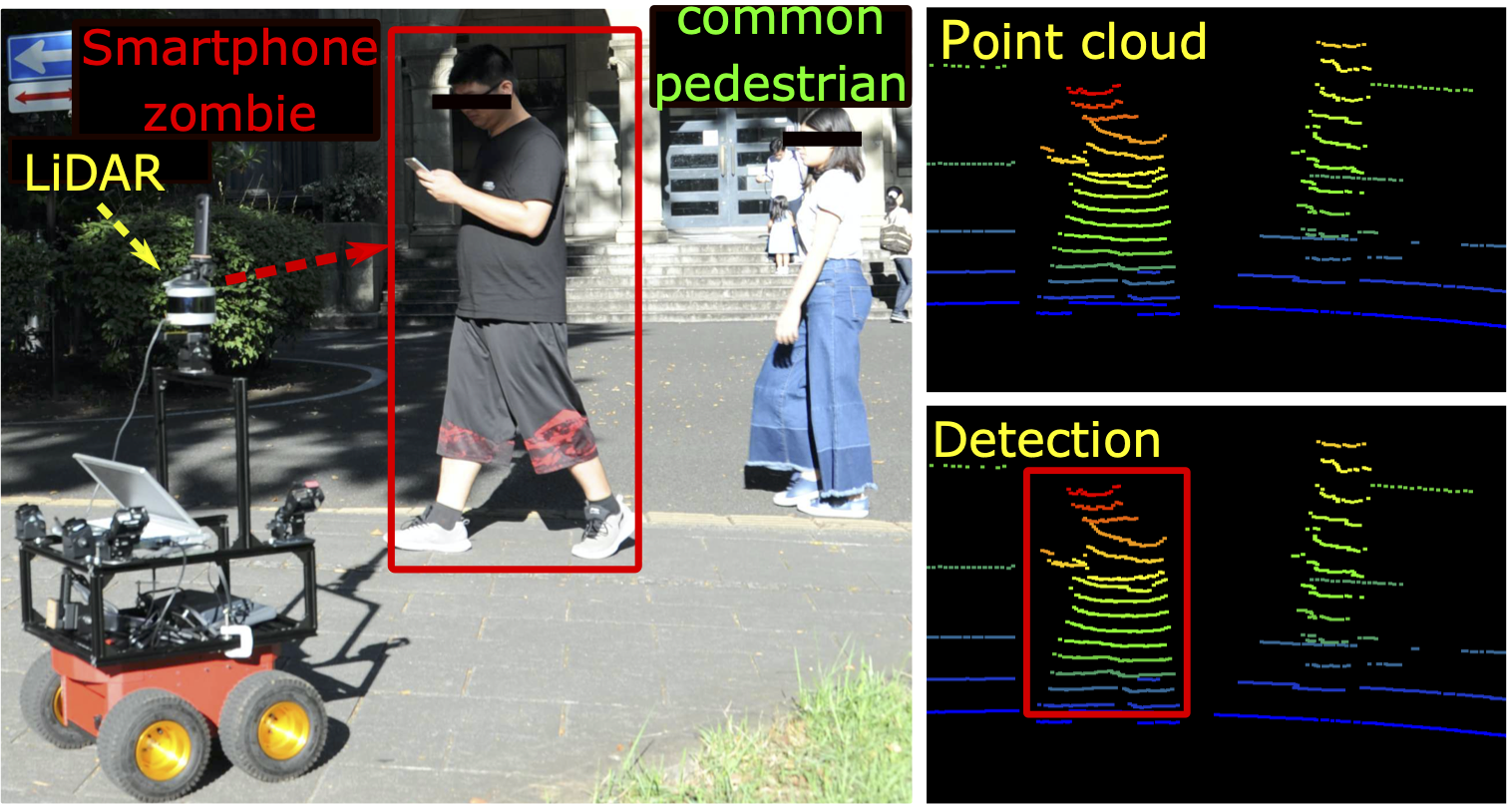
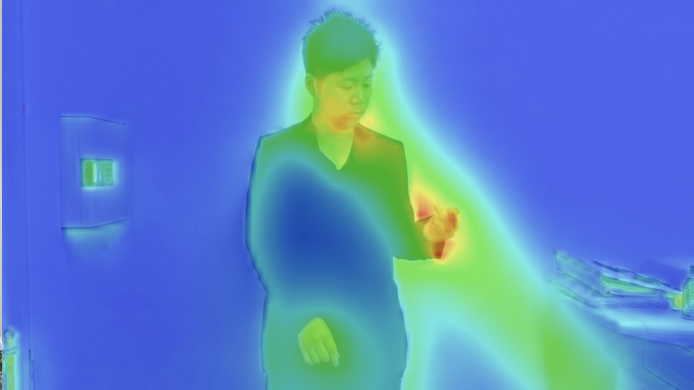
人間と移動ロボットの共存
研究者大学院工学研究科 ロボティクス専攻 先進ロボティクス講座(先進ロボティクス分野) 田村 雄介
Yusuke Tamura |
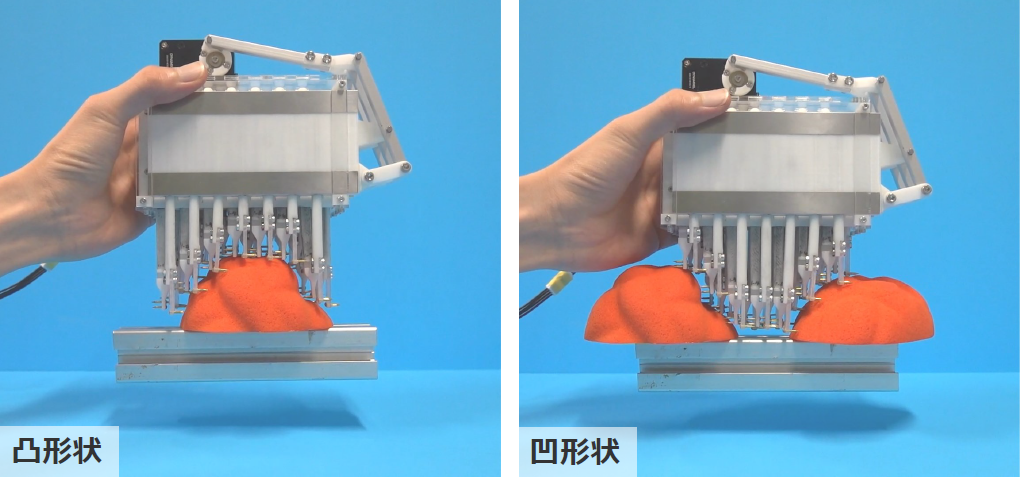
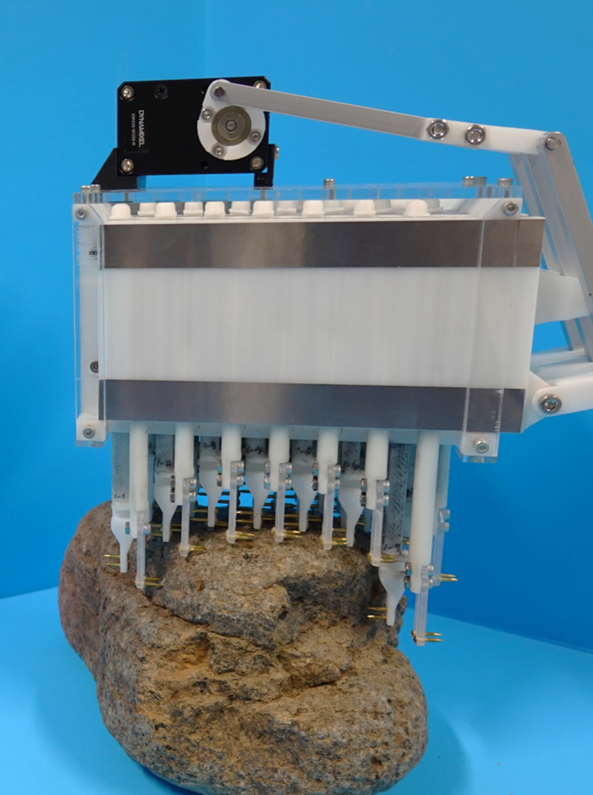
さまざまな凹凸形状をつかめるピン配列型把持機構
研究者大学院工学研究科 航空宇宙工学専攻 宇宙システム講座(宇宙探査工学分野) 宇野 健太朗
Kentaro Uno |