医療・創薬・医療機器
医療・創薬・医療機器
 ライフサイエンス
ライフサイエンス
 情報通信
情報通信
 環境
環境
 ナノテクノロジー・材料
ナノテクノロジー・材料
 エネルギー
エネルギー
 ものづくり・機械
ものづくり・機械
 社会基盤・安全
社会基盤・安全
 フロンティア・宇宙
フロンティア・宇宙
 人文・社会
人文・社会

ら行のキーワード 127ワード
ろ
〈ロボット教師〉
AI・ロボット時代における教員のワークライフバランスと学校の働き方改革
研究者大学院教育学研究科 青木 栄一
Eiichi Aoki |
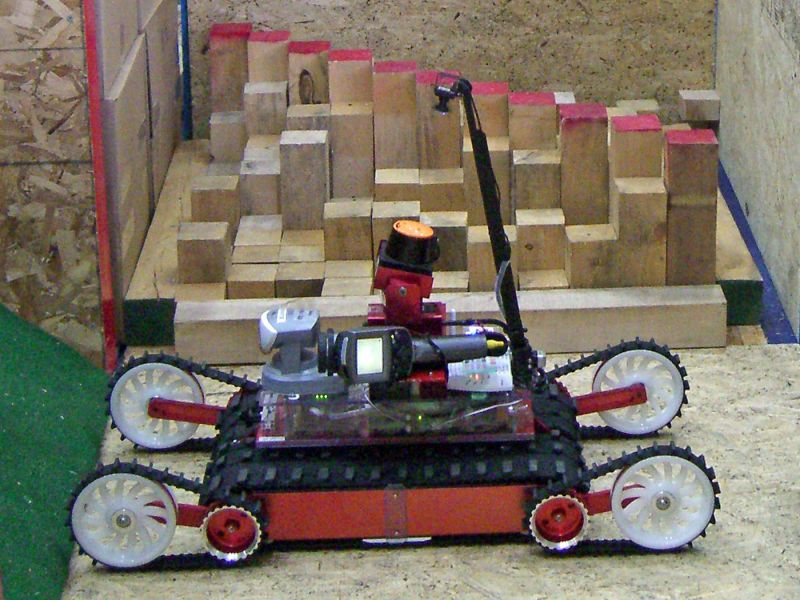
〈ロボティクス〉
安全で安心して暮らせる豊かな社会を実現するためのロボットテクノロジー
研究者タフ・サイバーフィジカルAI研究センター 田所 諭
Satoshi Tadokoro |
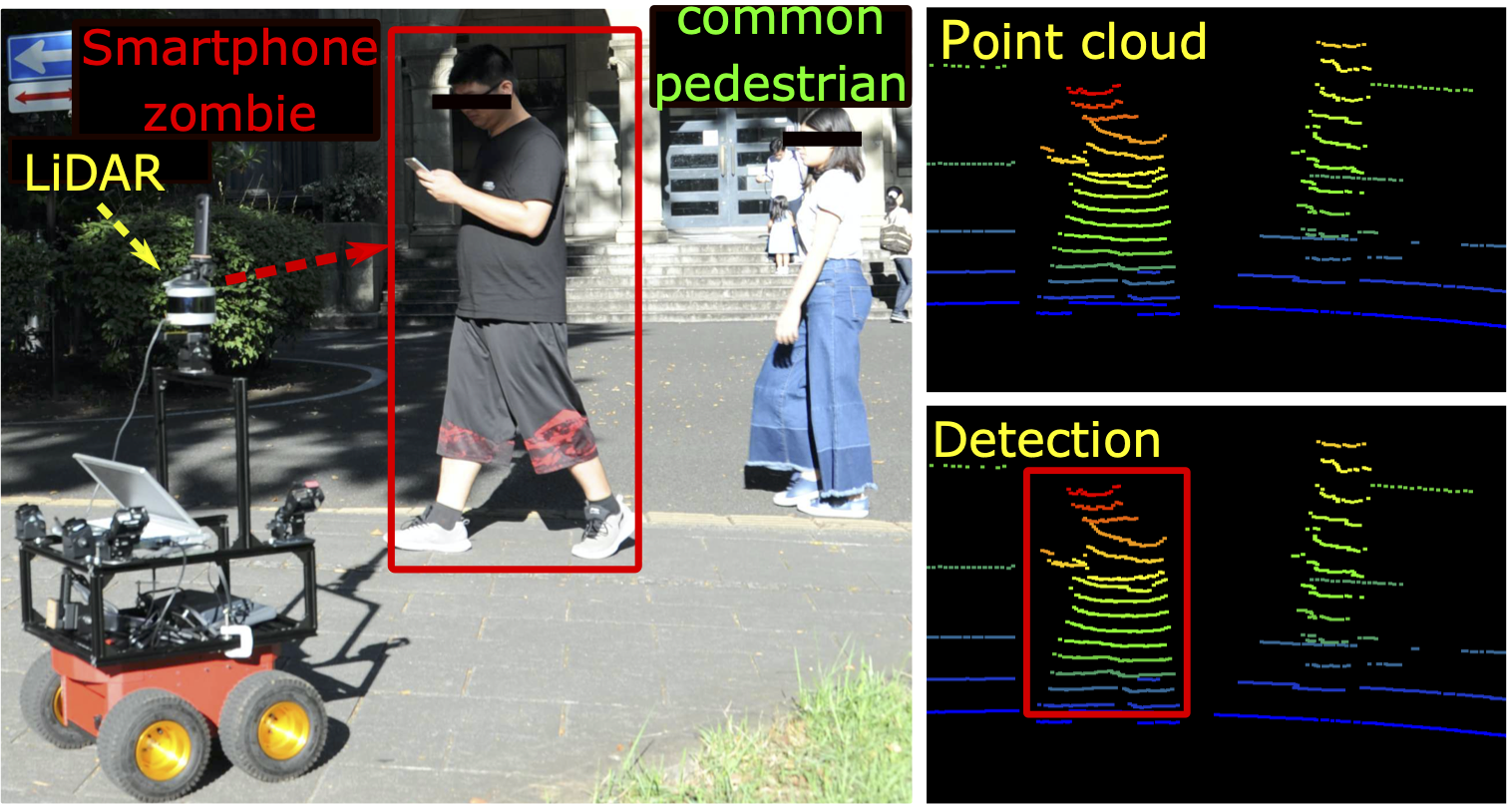
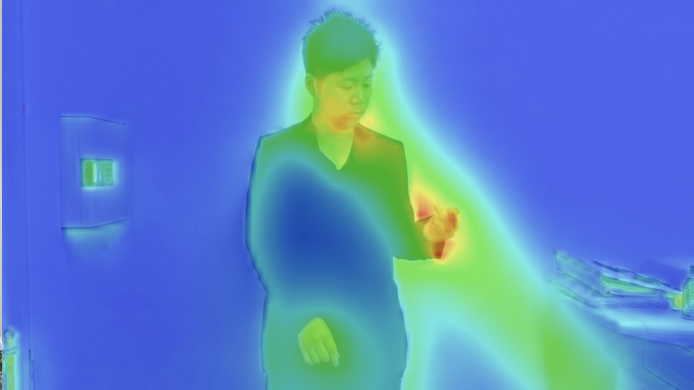
人間と移動ロボットの共存
研究者大学院工学研究科 田村 雄介
Yusuke Tamura |
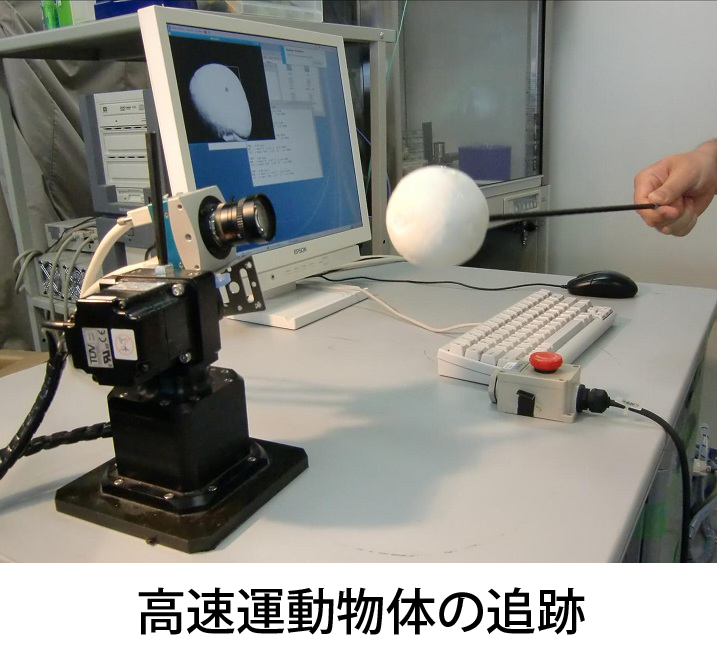
キャリブレーションを必要としない高度ビジョンシステム
研究者大学院情報科学研究科 橋本 浩一
Koichi Hashimoto |
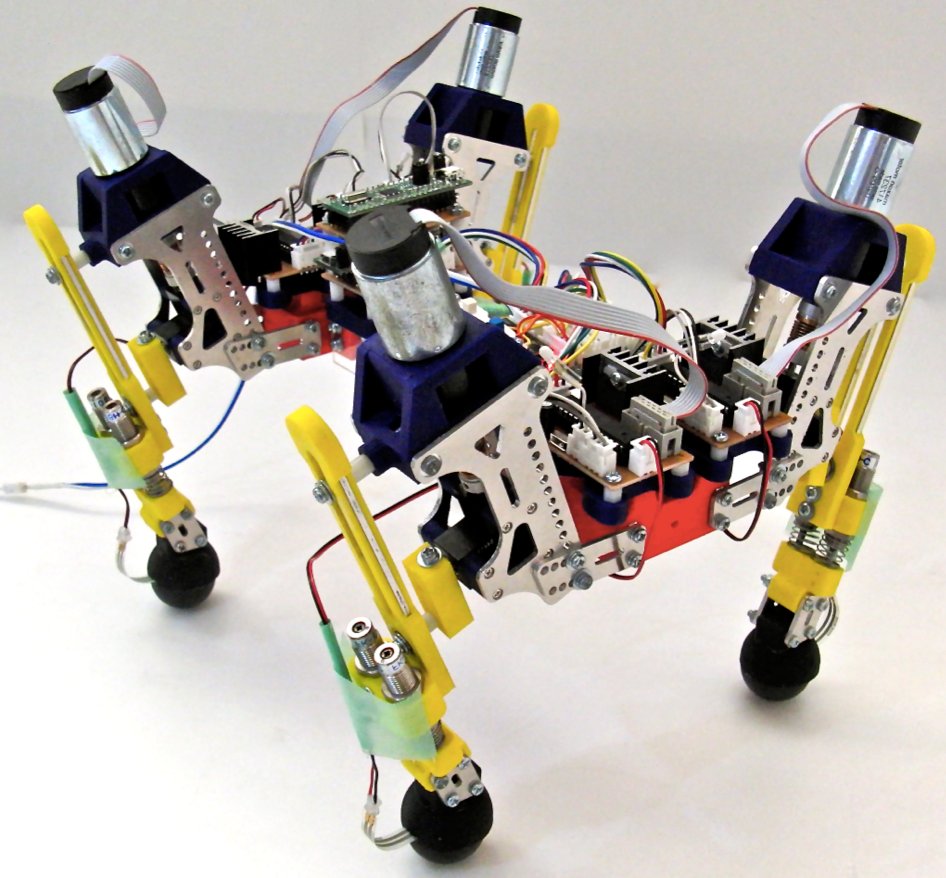
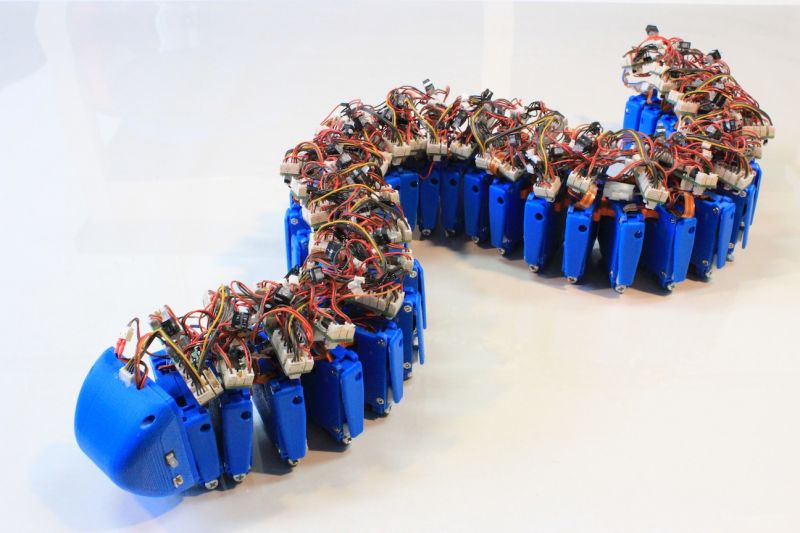
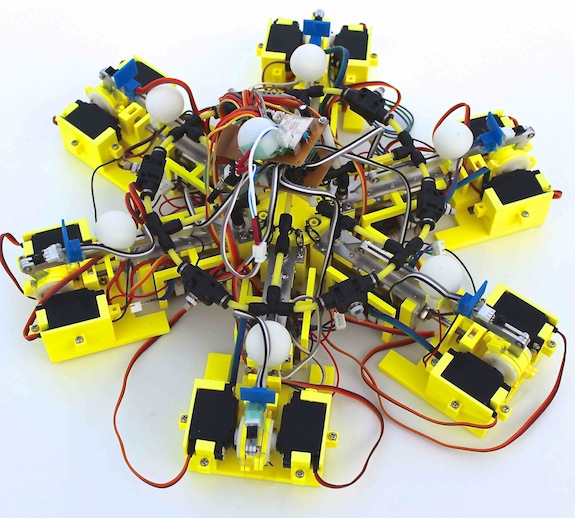
生物のようにしなやかでタフな人工物の開発
研究者電気通信研究所 石黒 章夫
Akio Ishiguro |
宇宙探査ロボットの研究・開発
研究者大学院工学研究科 吉田 和哉
Kazuya Yoshida |
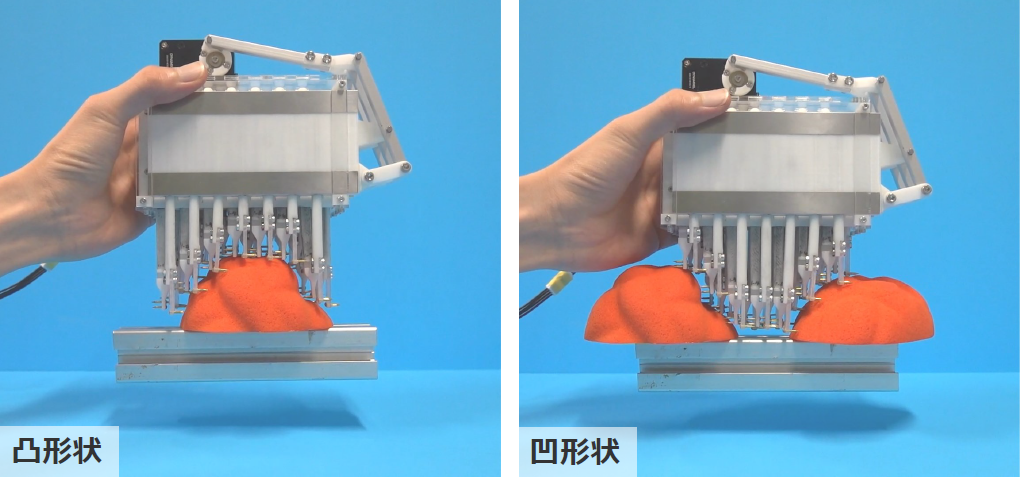
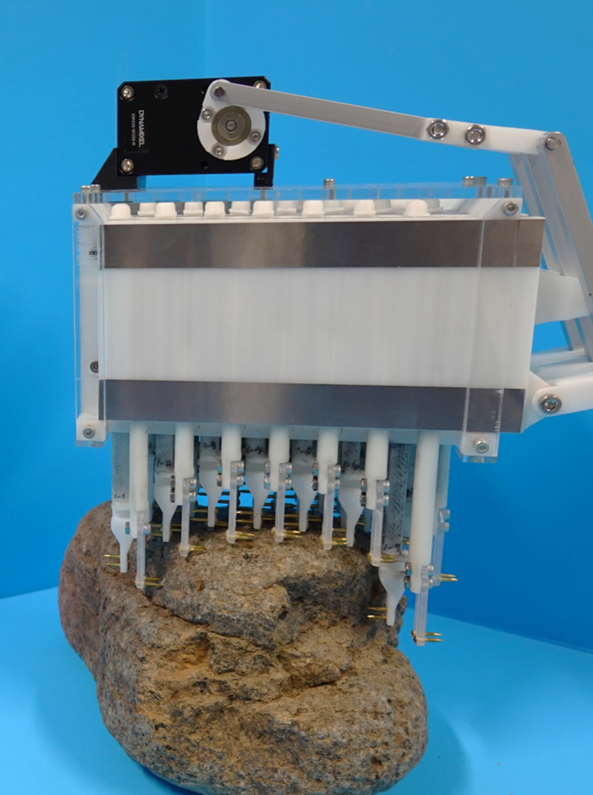
さまざまな凹凸形状をつかめるピン配列型把持機構
研究者大学院工学研究科 宇野 健太朗
Kentaro Uno |