
 医療・創薬・医療機器
医療・創薬・医療機器
 ライフサイエンス
ライフサイエンス
 情報通信
情報通信
 環境
環境
 ナノテクノロジー・材料
ナノテクノロジー・材料
 エネルギー
エネルギー
 ものづくり・機械
ものづくり・機械
 社会基盤・安全
社会基盤・安全
 フロンティア・宇宙
フロンティア・宇宙
 人文・社会
人文・社会

ら行のキーワード 100ワード
れ
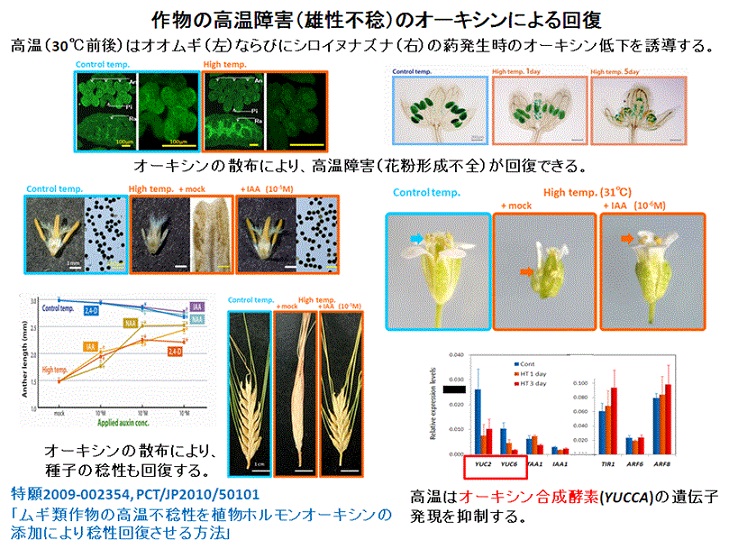
〈冷害〉
イネ科作物の高温・低温障害の克服法
研究者大学院生命科学研究科 分子化学生物学専攻 分子ネットワーク講座(分子遺伝生理分野) 東谷 篤志
Atsushi Higashitani |
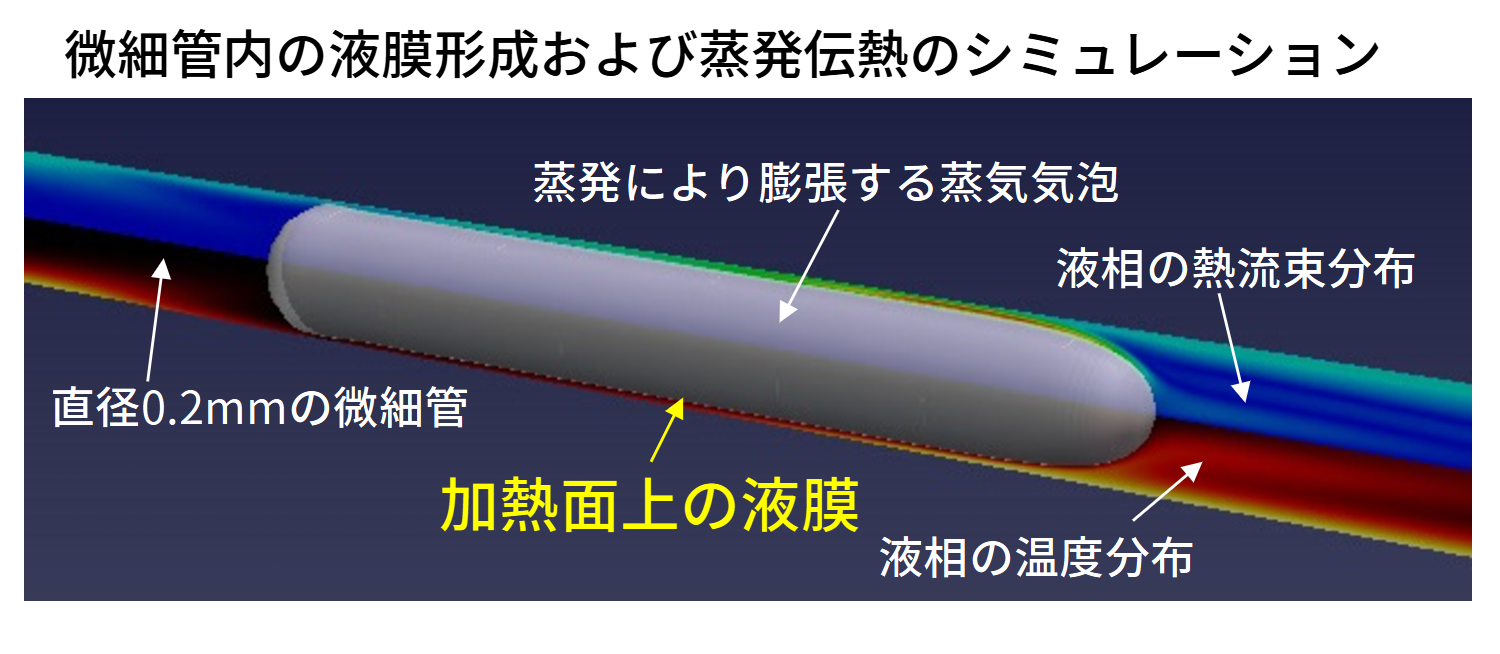
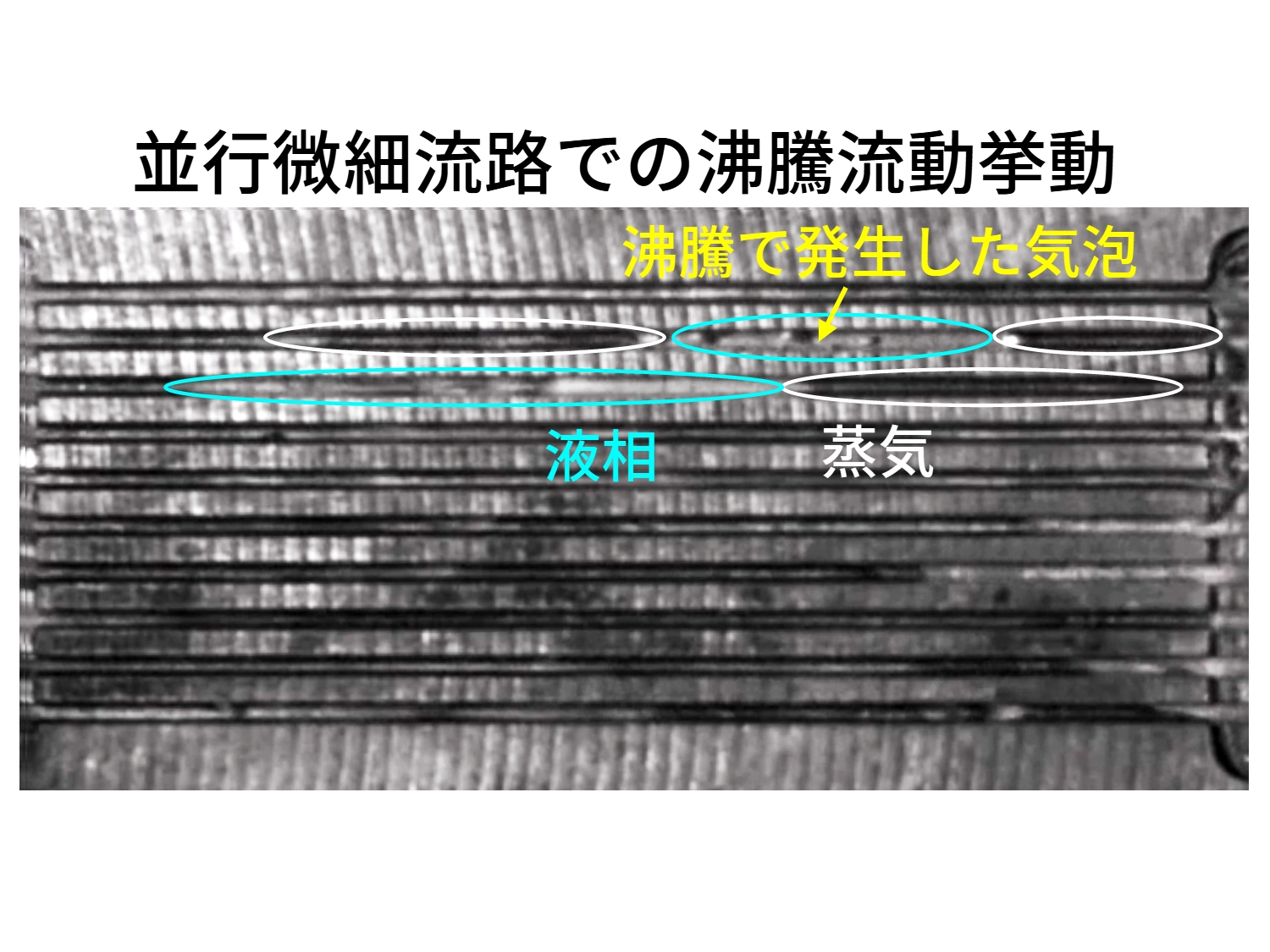
〈冷却〉
マイクロ流路内の相変化伝熱による高熱流束冷却機構
研究者流体科学研究所 複雑流動研究部門 先進流体機械システム研究分野 岡島 淳之介
Junnosuke Okajima |
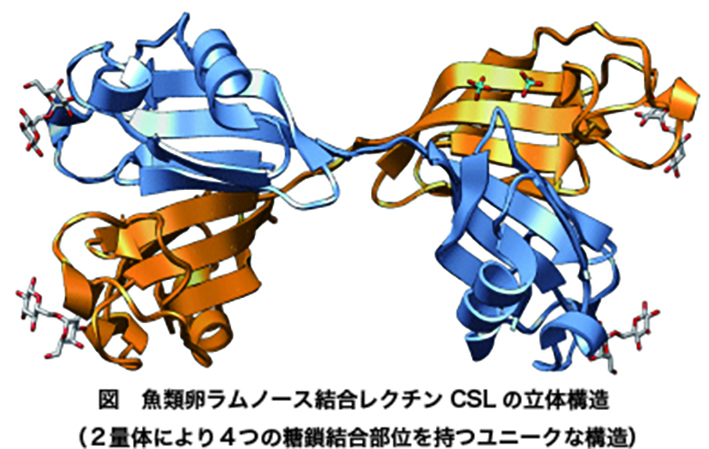
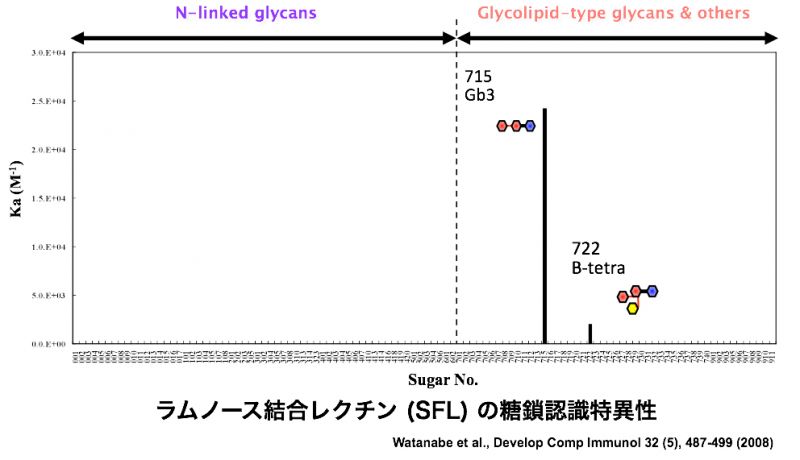
〈レクチン〉
糖鎖精密認識レクチンによる糖鎖解析および細胞制御
研究者大学院農学研究科 農芸化学専攻 生物化学講座(酵素化学分野) 小川 智久
Tomohisa Ogawa |
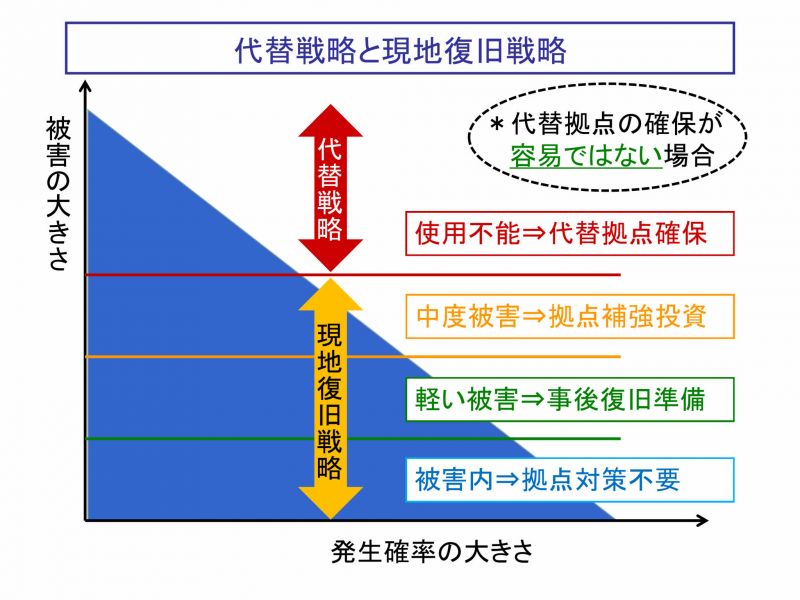
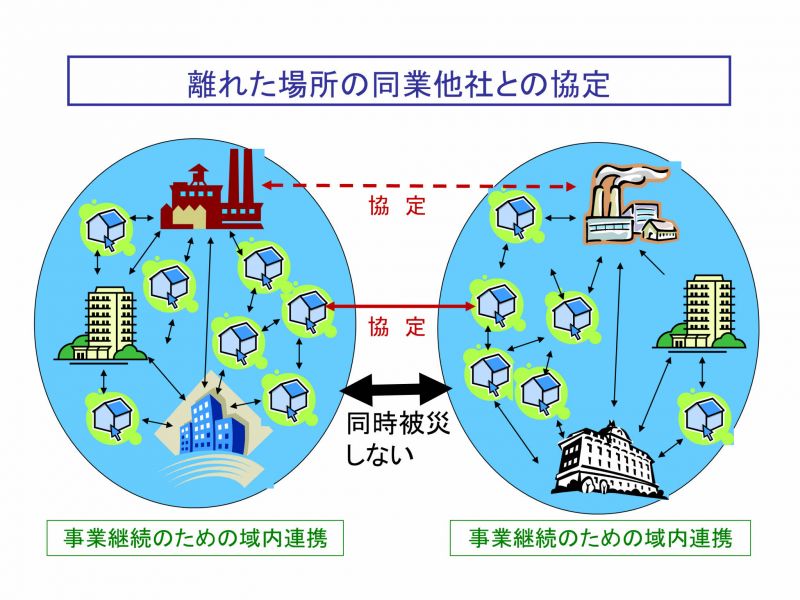
〈レジリエンス〉
事業継続マネジメント(BCM)
研究者災害科学国際研究所 防災実践推進部門 防災社会推進分野 丸谷 浩明
Hiroaki Maruya |

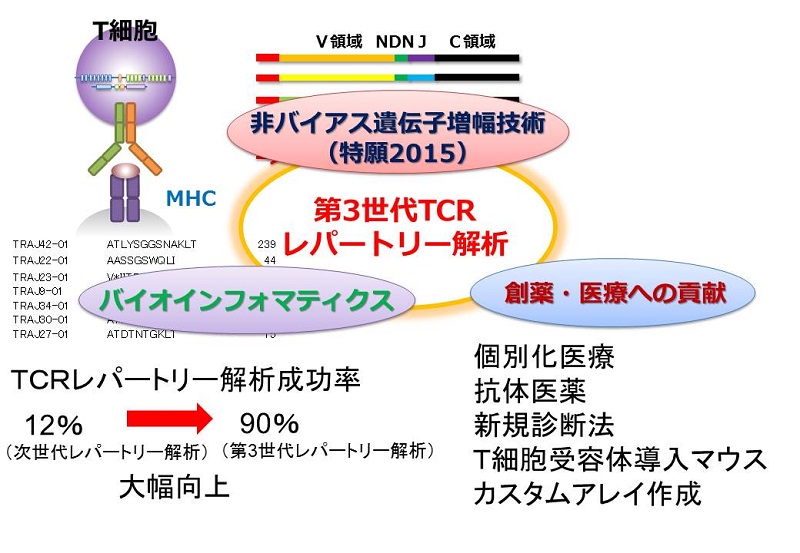
〈レパートリー〉
第3世代 T細胞レパートリー解析技術開発
研究者加齢医学研究所 加齢制御研究部門 生体防御学分野 小笠原 康悦
Koetsu Ogasawara |
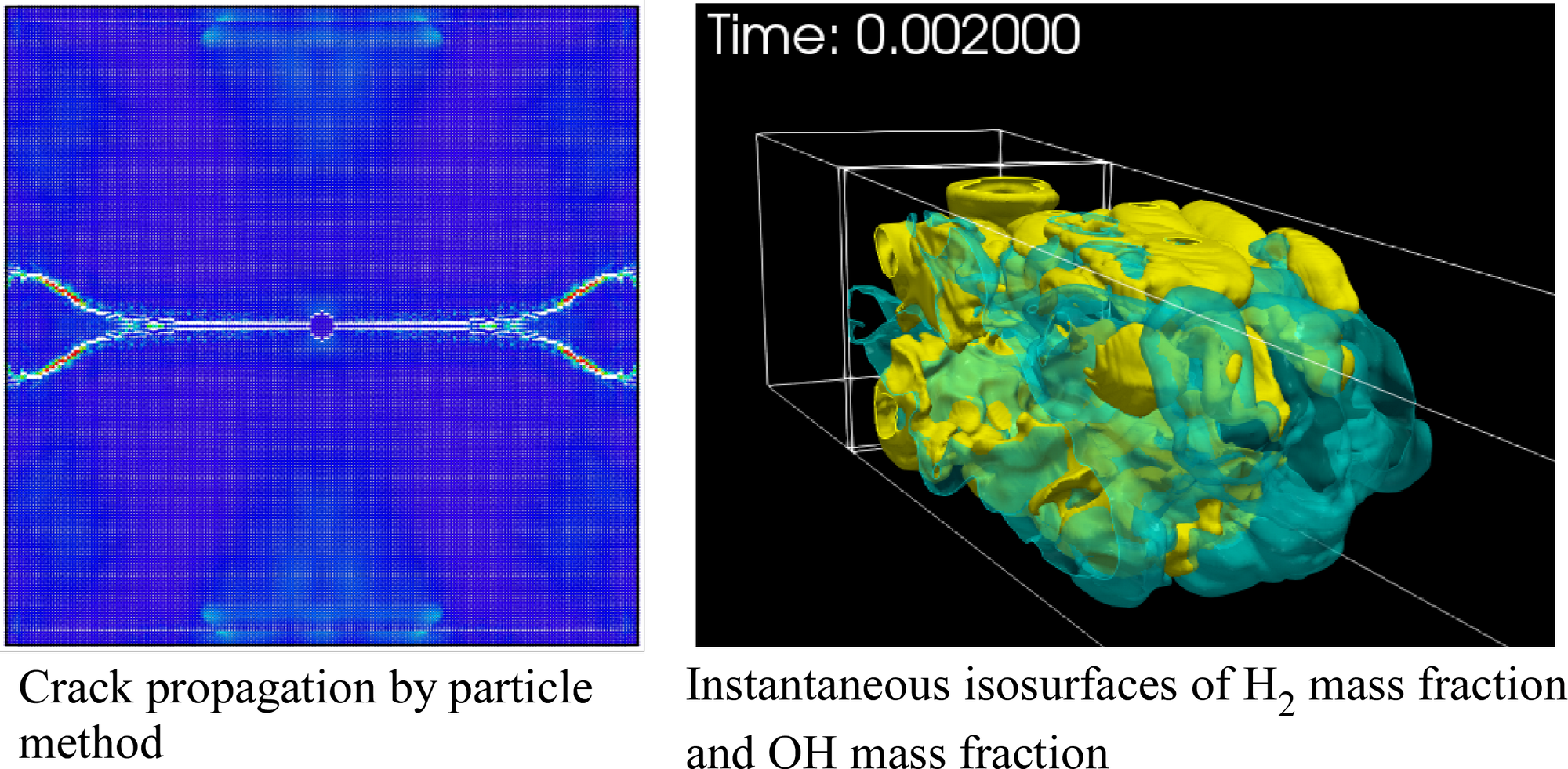
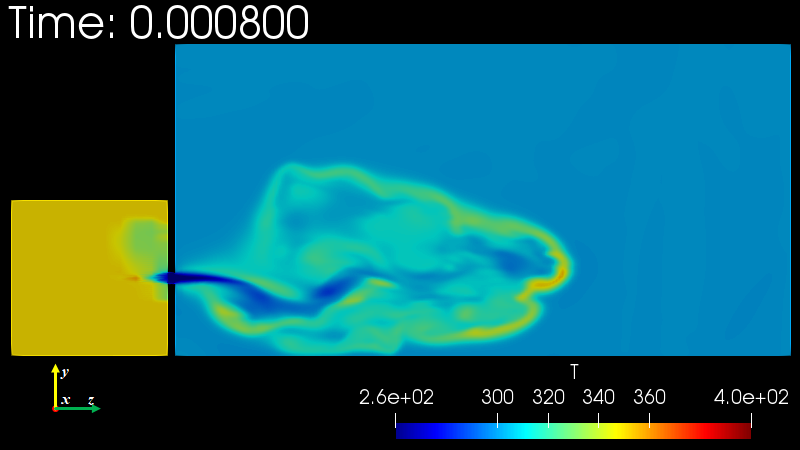
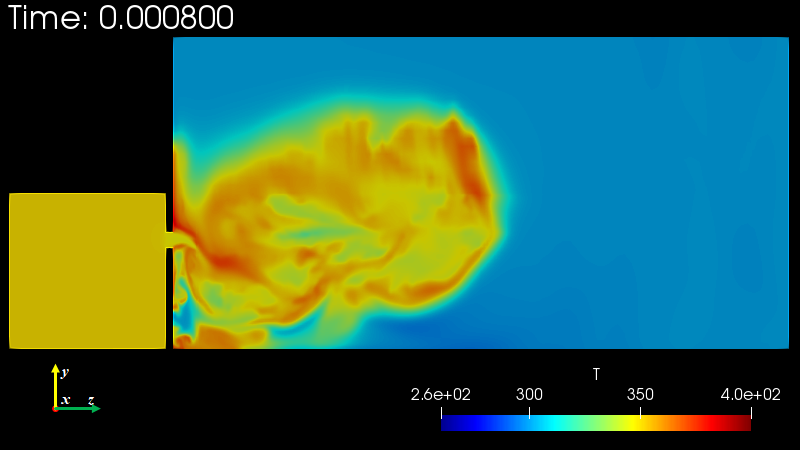
〈連成解析〉
水素エネルギーシステムの統合型安全管理技術の開発
研究者流体科学研究所 附属統合流動科学国際研究教育センター 混相流動エネルギー研究分野 石本 淳
Jun Ishimoto |
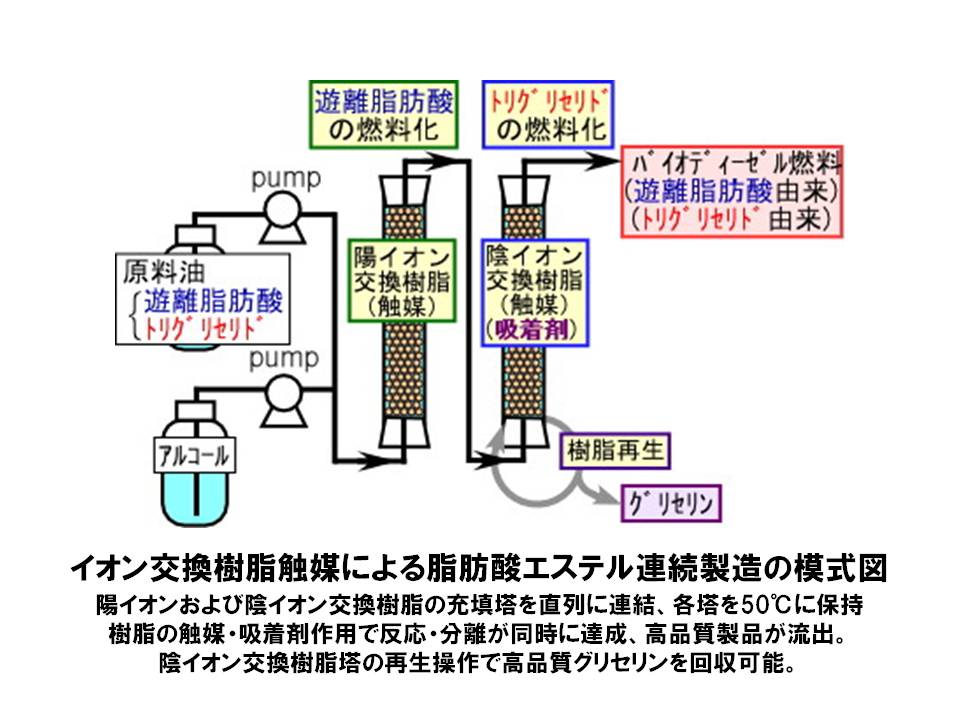
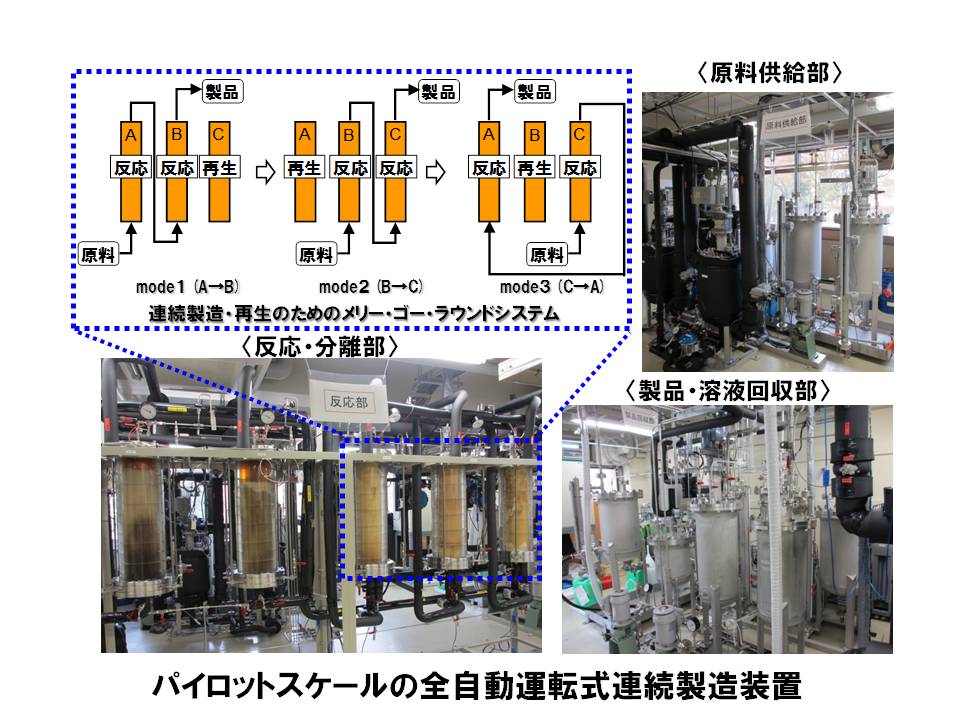
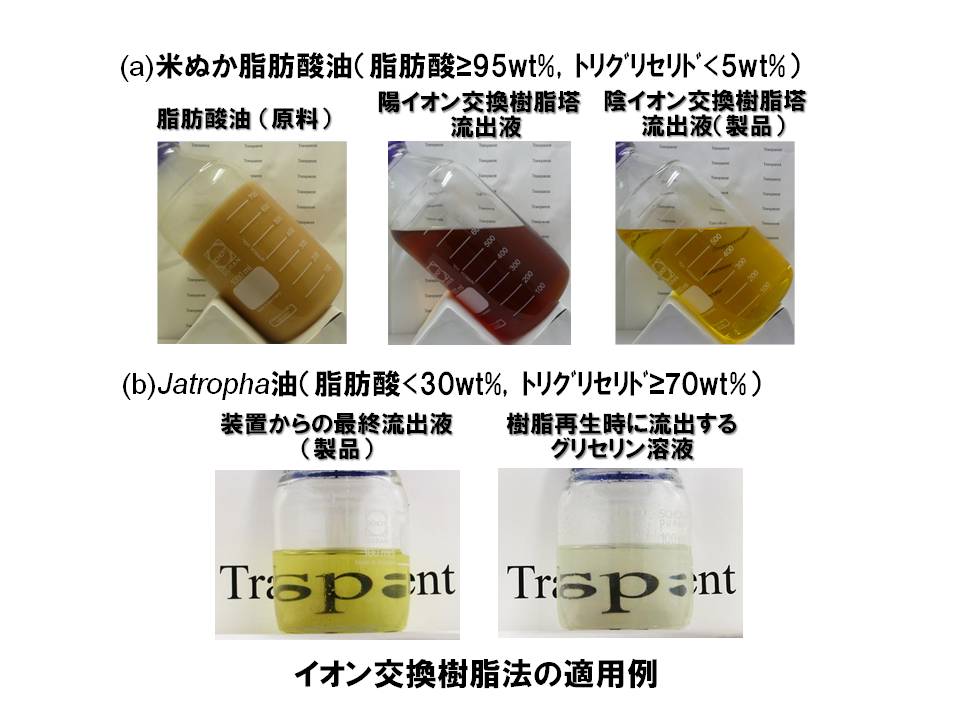
〈連続製造技術〉
イオン交換樹脂を触媒とした高品質脂肪酸エステル連続製造技術
研究者大学院工学研究科 化学工学専攻 プロセス要素工学講座(反応プロセス工学分野) 北川 尚美
Naomi Kitakawa |
ろ
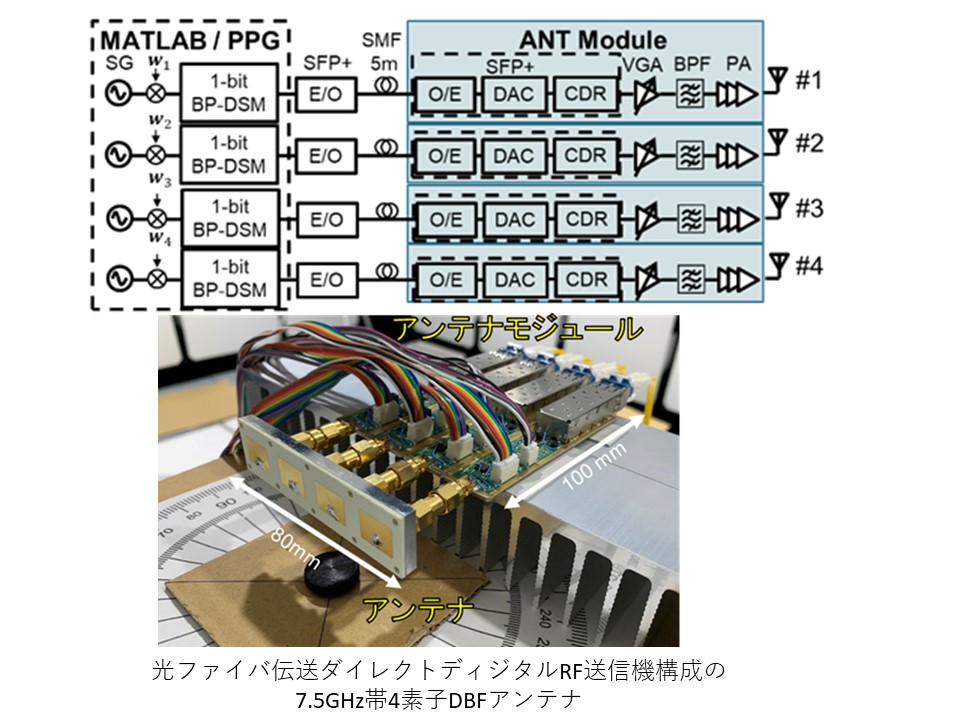
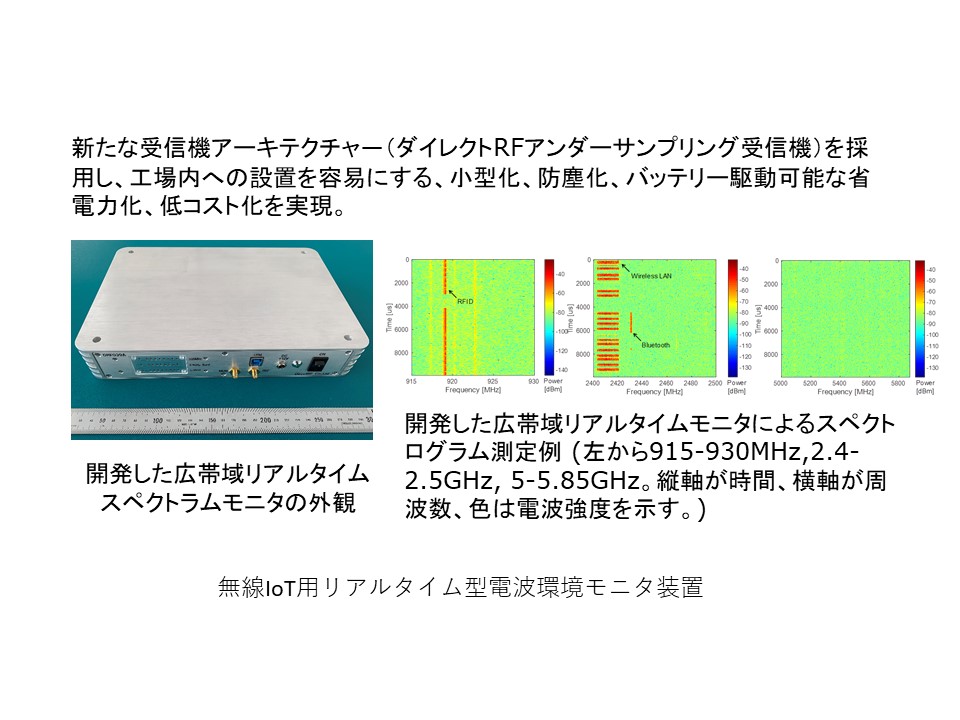
〈ローカル5G〉
次世代ワイヤレスIoT実現のための無線機ハードウェアおよび通信システムの研究
研究者電気通信研究所 情報通信基盤研究部門 先端ワイヤレス通信技術研究室 末松 憲治
Noriharu Suematsu |
〈漏えい〉
水素エネルギーシステムの統合型安全管理技術の開発
研究者流体科学研究所 附属統合流動科学国際研究教育センター 混相流動エネルギー研究分野 石本 淳
Jun Ishimoto |
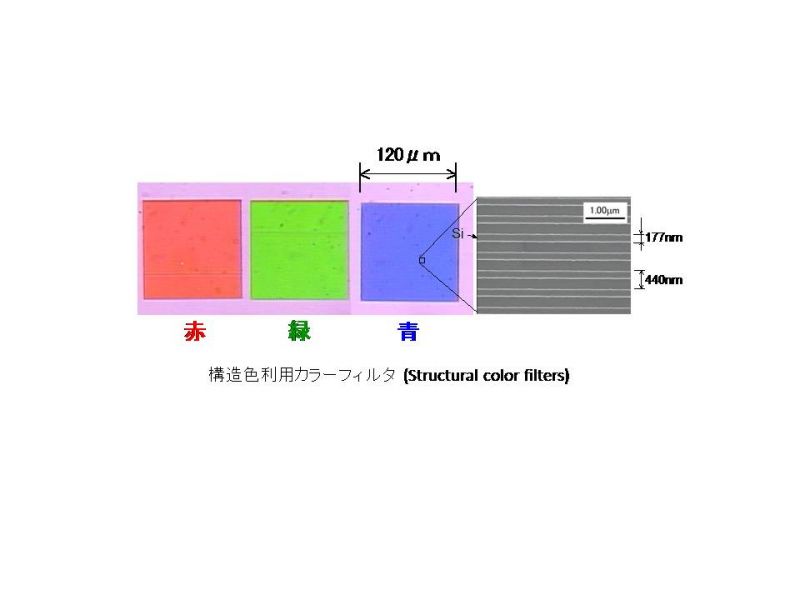
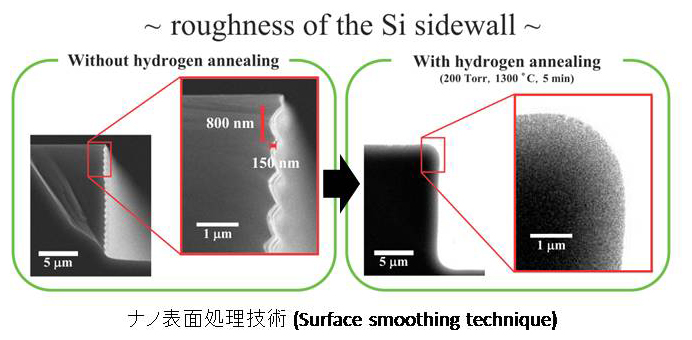
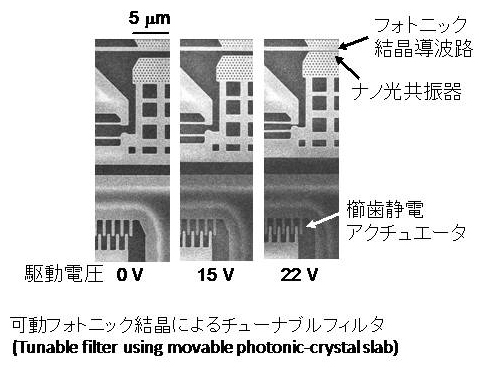
〈6G〉
ナノスケール超微細構造を利用した超小型・高機能光デバイスの開発
研究者大学院工学研究科 ロボティクス専攻 ナノシステム講座(情報ナノシステム学分野) 金森 義明
Yoshiaki Kanamori |
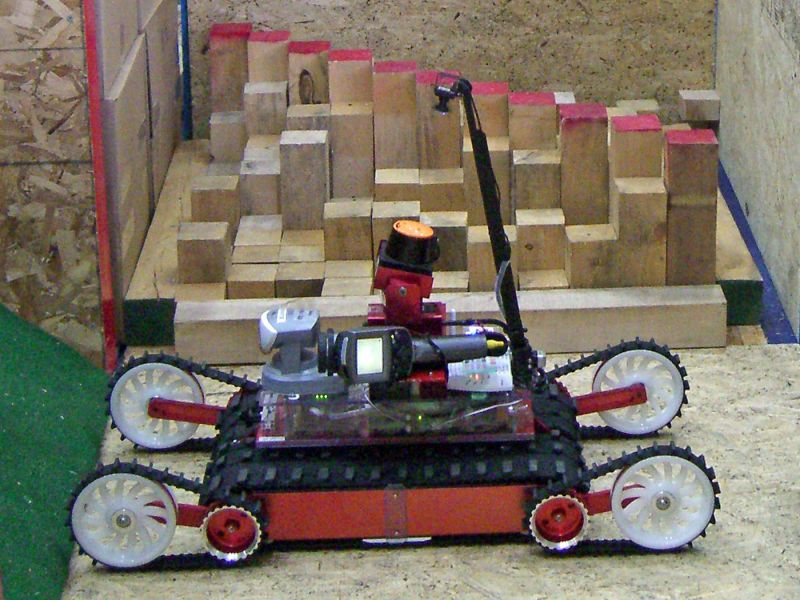
〈ロボット〉
安全で安心して暮らせる豊かな社会を実現するためのロボットテクノロジー
研究者大学院情報科学研究科 応用情報科学専攻 応用情報技術論講座(人間-ロボット情報学分野) 田所 諭
Satoshi Tadokoro |
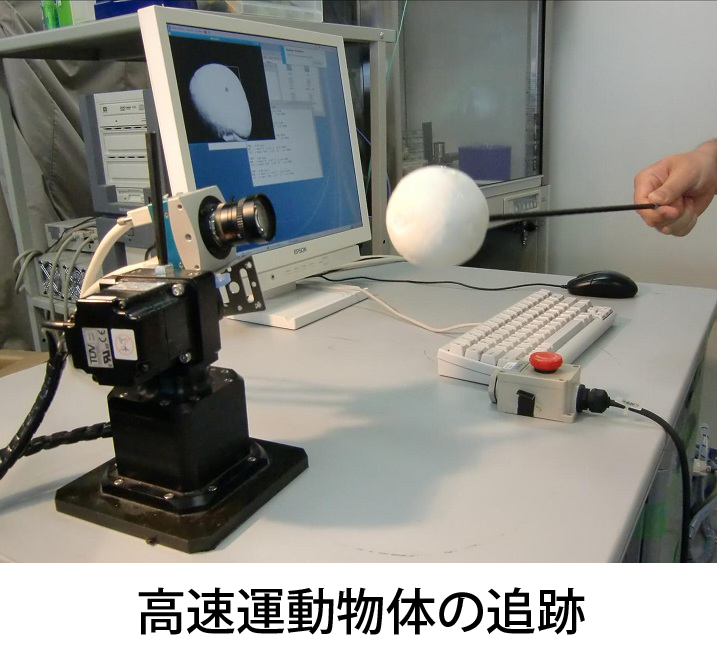
キャリブレーションを必要としない高度ビジョンシステム
研究者大学院情報科学研究科 システム情報科学専攻 知能ロボティクス学講座(知能制御システム学分野) 橋本 浩一
Koichi Hashimoto |
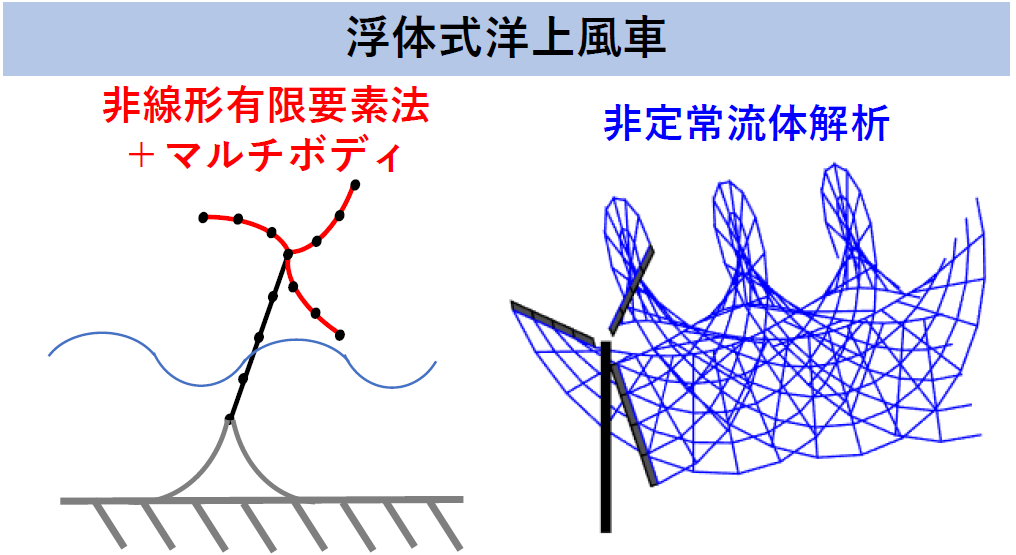
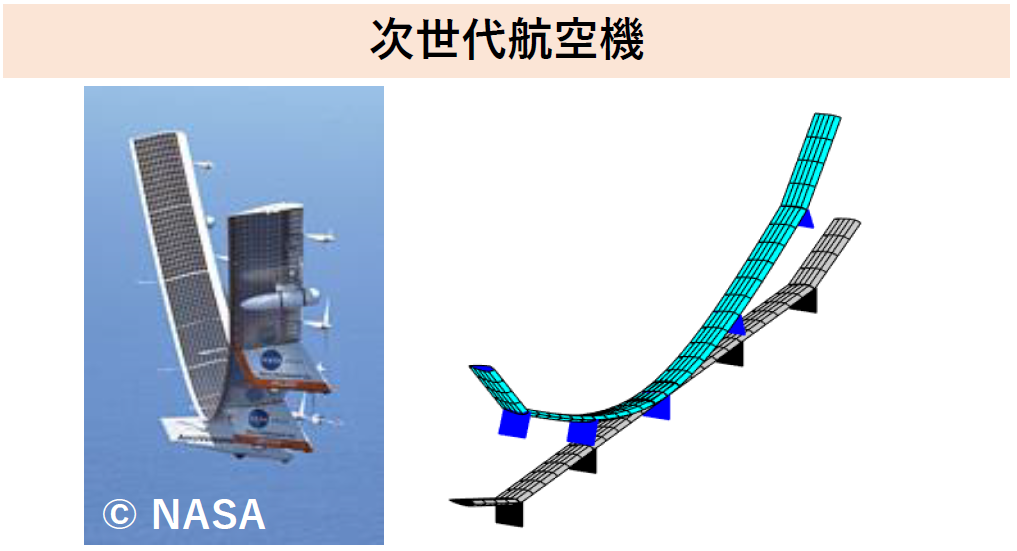
浮体式洋上風車・次世代航空機の非線形空力弾性・マルチボディ解析技術
研究者大学院工学研究科 航空宇宙工学専攻 宇宙システム講座(宇宙構造物工学分野) 大塚 啓介
Keisuke Otsuka |
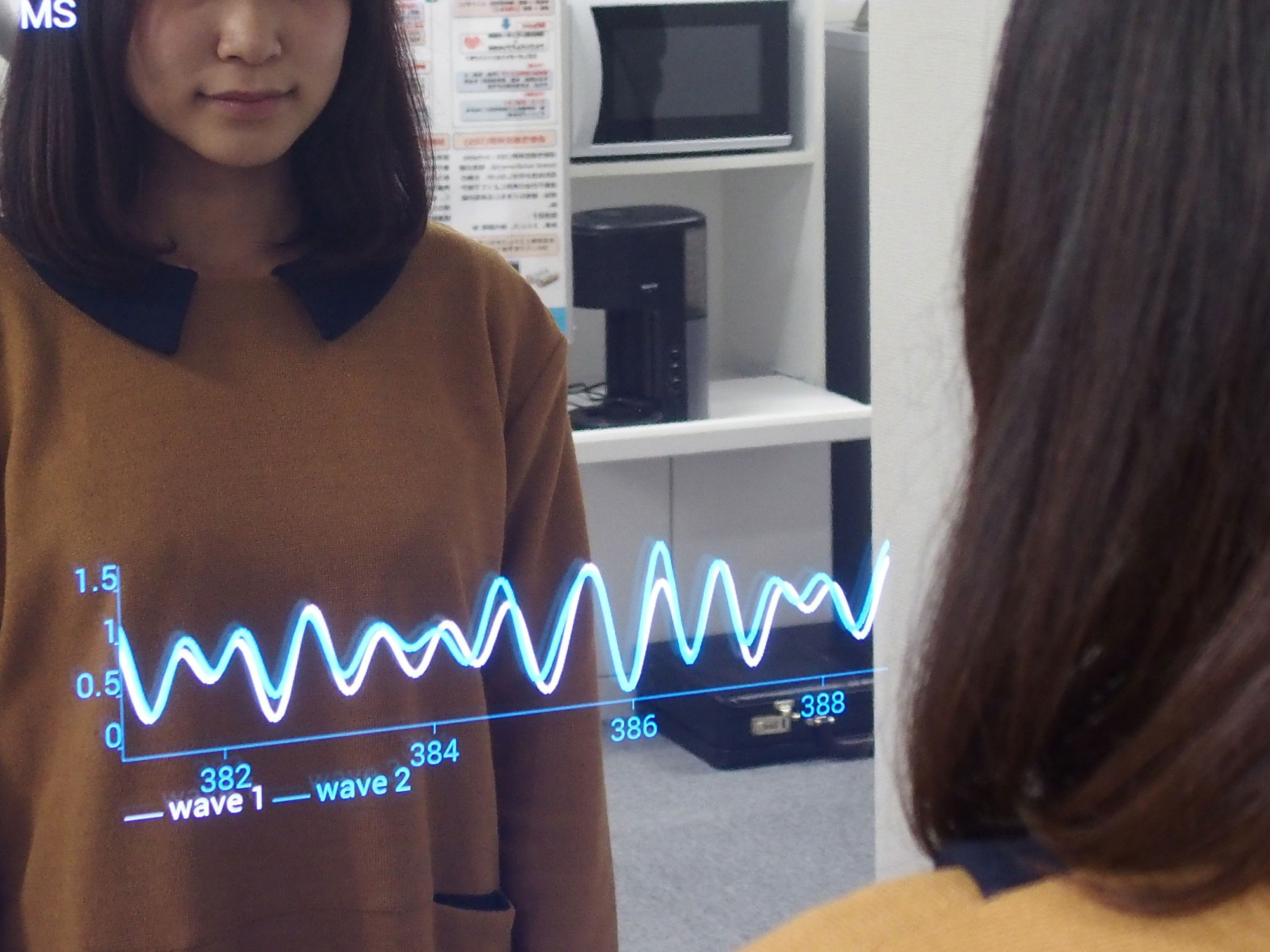
非接触方式による生体信号計測
研究者サイバーサイエンスセンター 研究開発部 サイバーフィジカルシステム研究部 杉田 典大
Norihiro Sugita |




〈ロボティクス〉
安全で安心して暮らせる豊かな社会を実現するためのロボットテクノロジー
研究者大学院情報科学研究科 応用情報科学専攻 応用情報技術論講座(人間-ロボット情報学分野) 田所 諭
Satoshi Tadokoro |
キャリブレーションを必要としない高度ビジョンシステム
研究者大学院情報科学研究科 システム情報科学専攻 知能ロボティクス学講座(知能制御システム学分野) 橋本 浩一
Koichi Hashimoto |
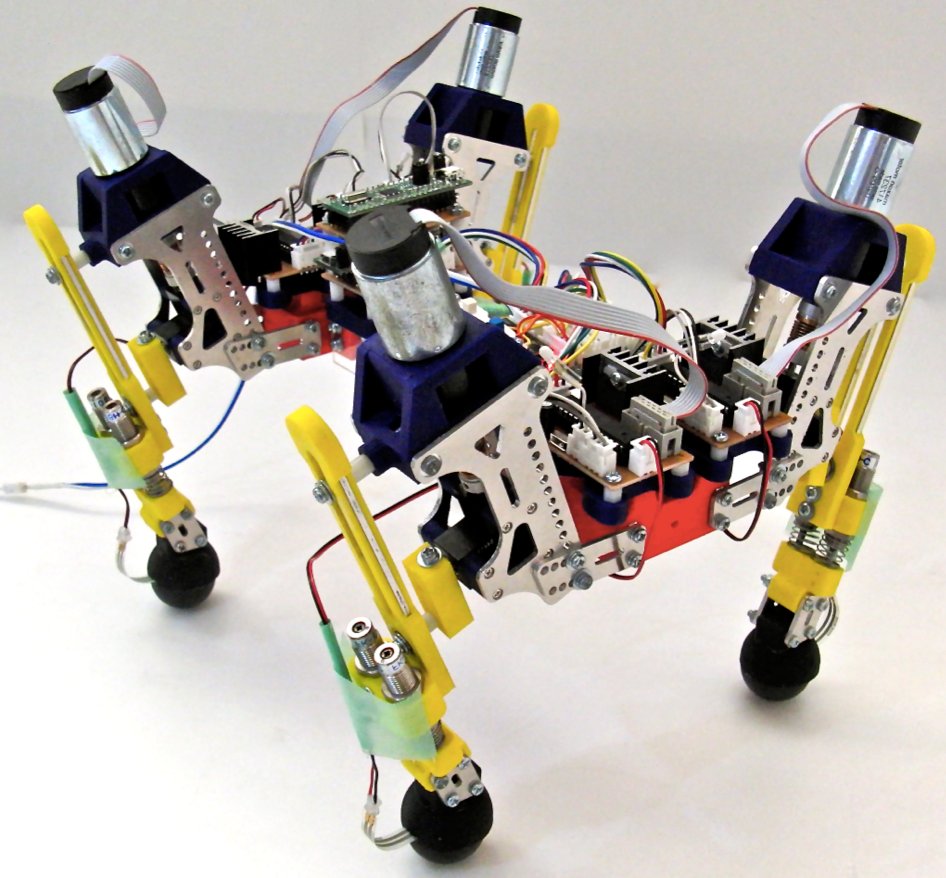
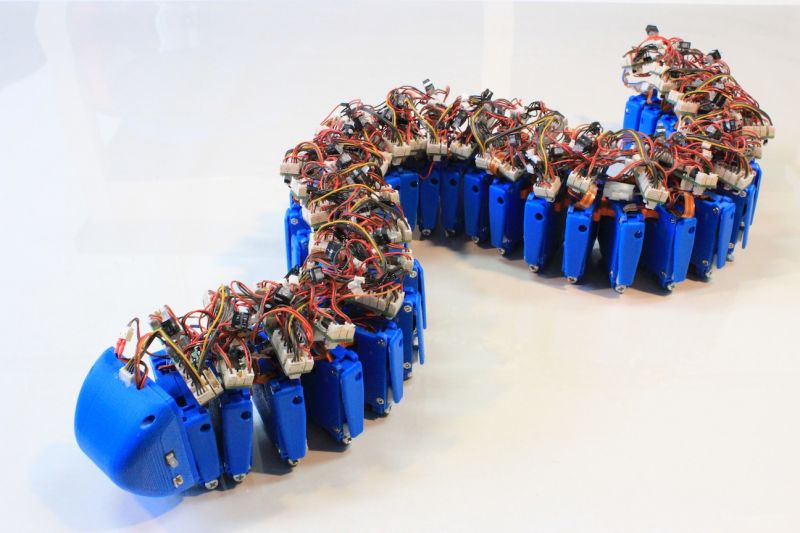
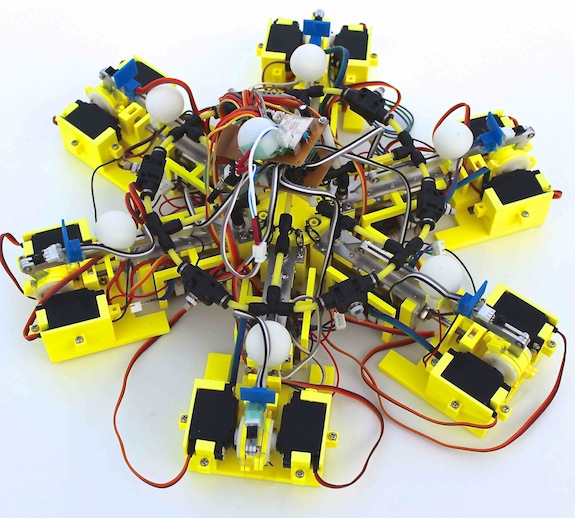
生物のようにレジリエント(しなやかでタフ)な人工物の開発
研究者電気通信研究所 人間・生体情報システム研究部門 実世界コンピューティング研究室 石黒 章夫
Akio Ishiguro |
宇宙探査ロボットの研究・開発
研究者大学院工学研究科 航空宇宙工学専攻 宇宙システム講座(宇宙探査工学分野) 吉田 和哉
Kazuya Yoshida |
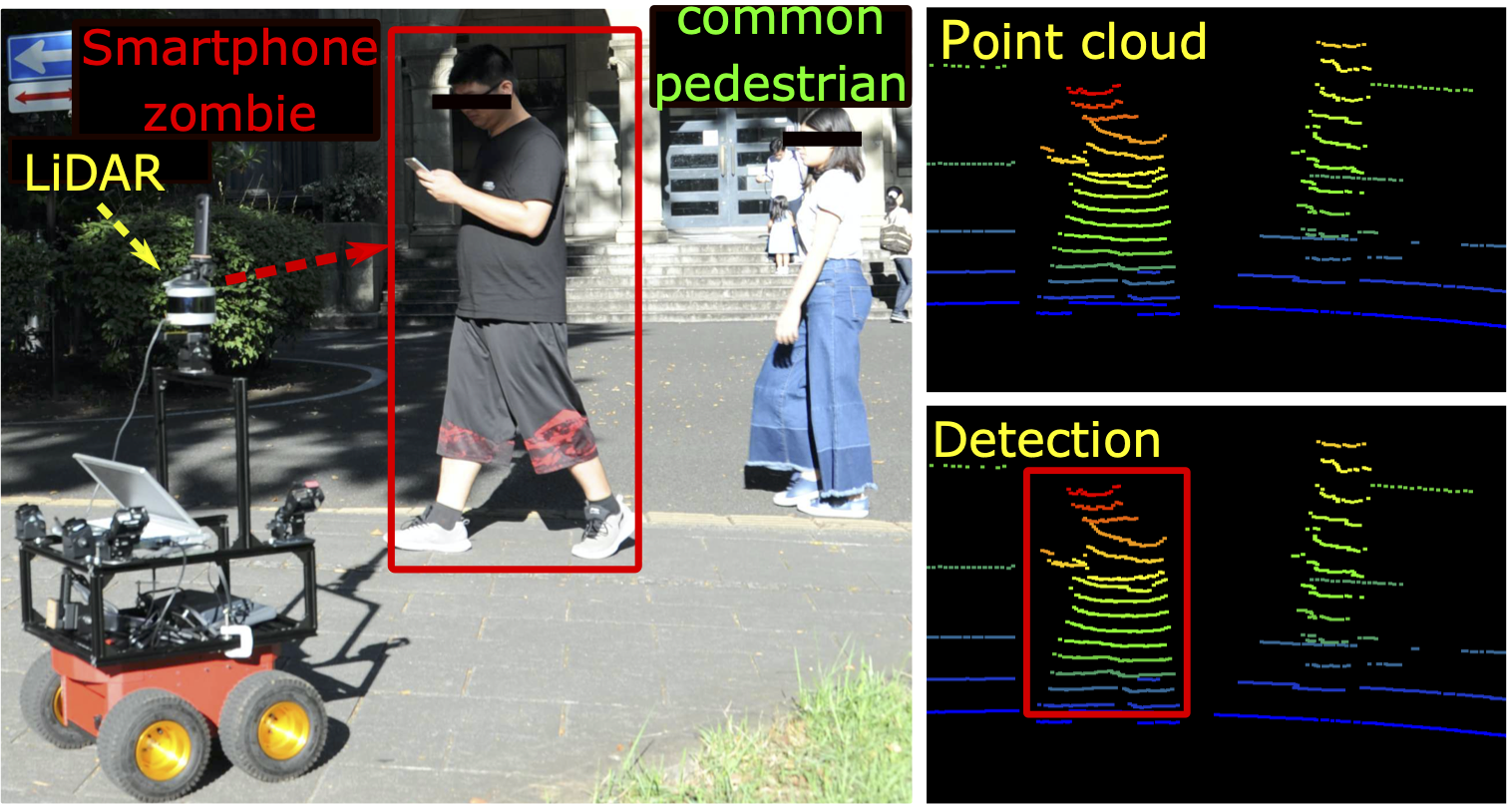
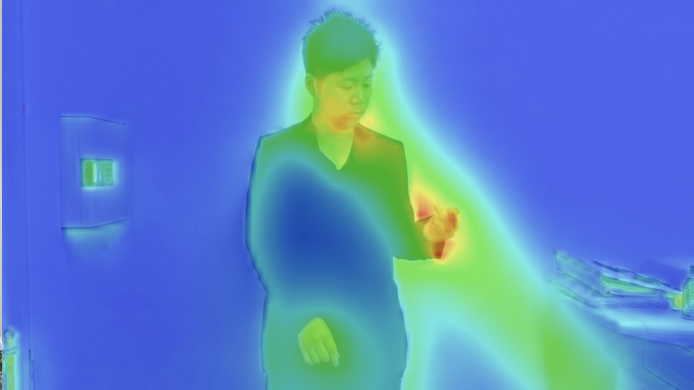
人間と移動ロボットの共存
研究者大学院工学研究科 ロボティクス専攻 先進ロボティクス講座(先進ロボティクス分野) 田村 雄介
Yusuke Tamura |
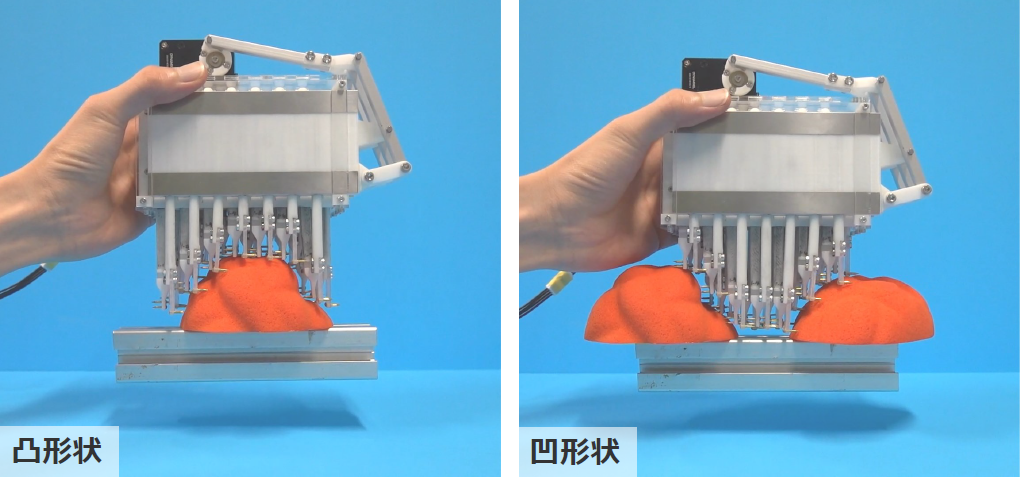
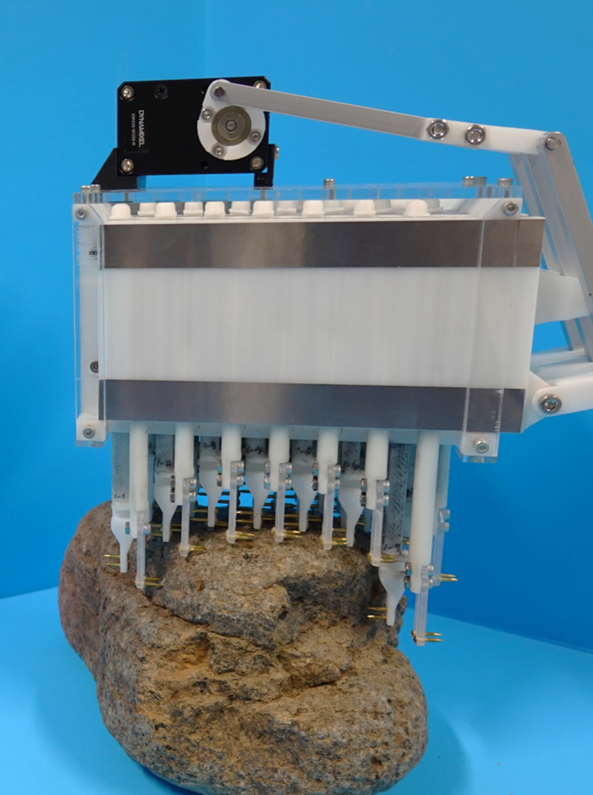
さまざまな凹凸形状をつかめるピン配列型把持機構
研究者大学院工学研究科 航空宇宙工学専攻 宇宙システム講座(宇宙探査工学分野) 宇野 健太朗
Kentaro Uno |


{kind=link}
{kind=link}
{kind=link}
{kind=link}