
 Medical
Medical
 Life Sciences
Life Sciences
 Information Communication
Information Communication
 Environment
Environment
 Nanotechnology / Materials
Nanotechnology / Materials
 Energy
Energy
 Social Infrastructure
Social Infrastructure
 Frontier
Frontier
 Human and social sciences
Human and social sciences

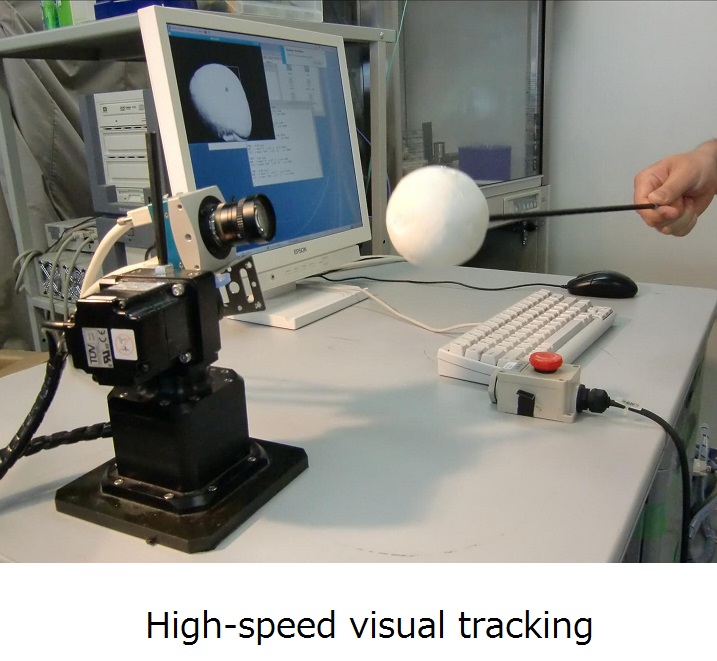
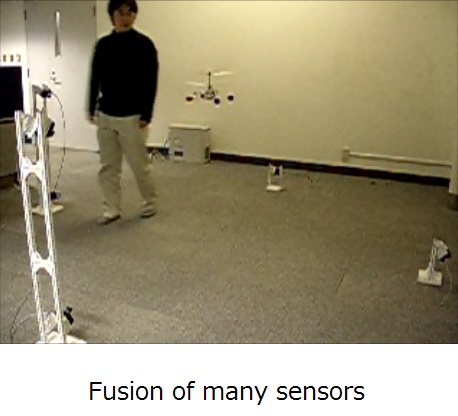
 Advanced Vision System with Less Calibration
Advanced Vision System with Less Calibration
update:2025/06/30

- Features and Uniqueness
-
The difficulties of introducing robot systems in production line are maintenance of environment and teaching of robot motion. Environ recognition and motion teaching using vision system will greatly improve the difficulties. However, calibration of vision-robot system is tedious and troublesome. Feedback control using vision sensor information will allow robustness against environment and teach by showing. This technique is called visual servo.
- Practical Application
-
Visual servo will allow flexible camera setting, calibration-less system setting, and easy teaching.
- Keywords
Researchers
Graduate School of Information Sciences
Koichi Hashimoto, Professor
Doctor of Engineering
